Das ist die deutschsprachige Version.
Das ist die deutschsprachige Version.  English versions will be available on en.yukterez.net and yukipedia. Last update: 9.9.2020
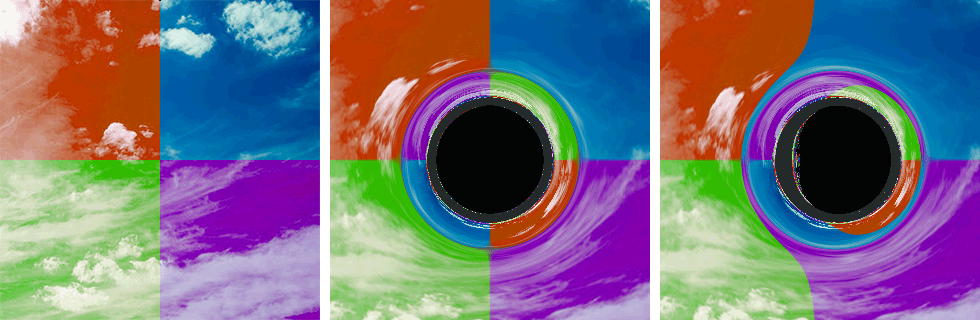
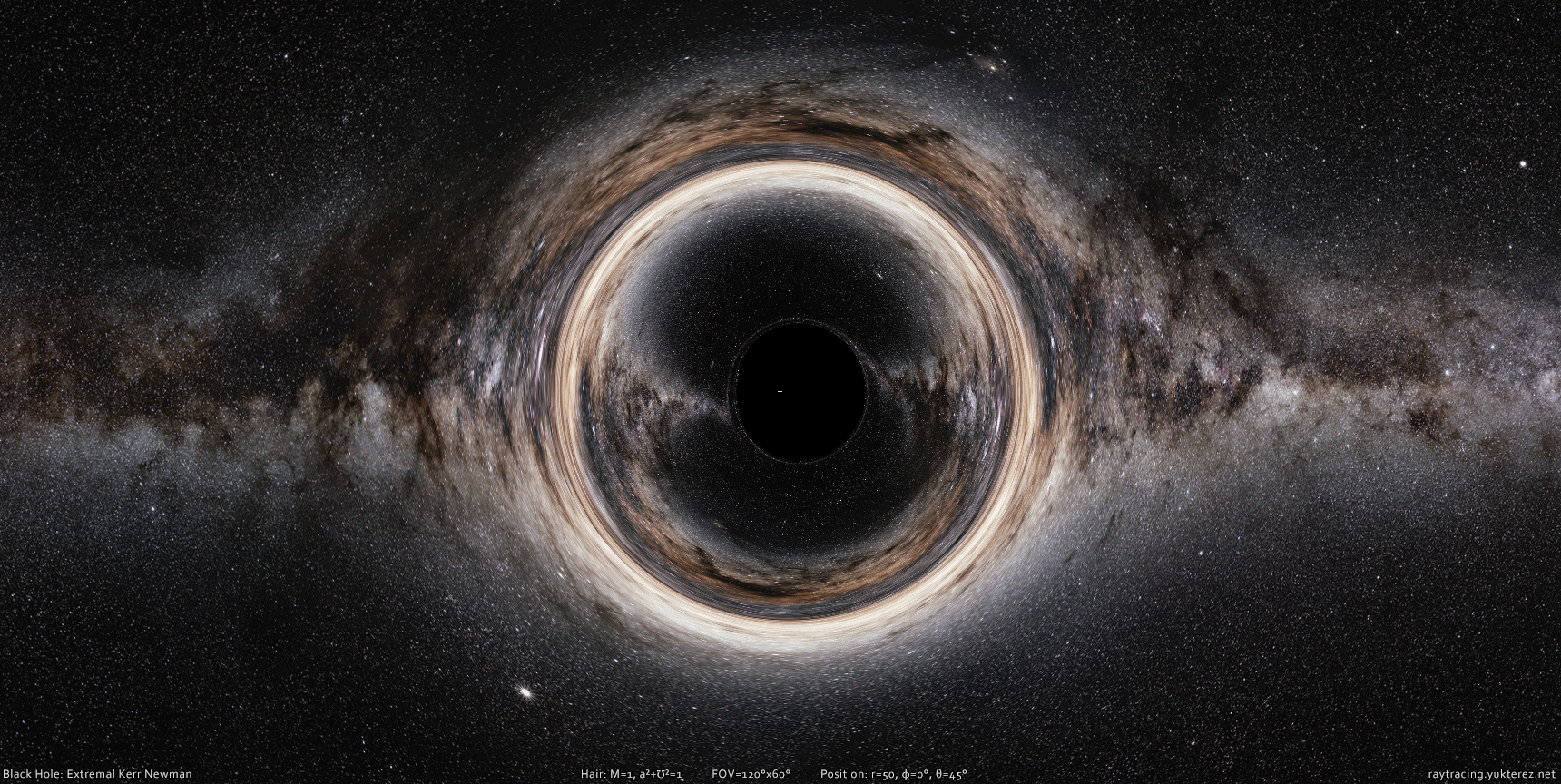
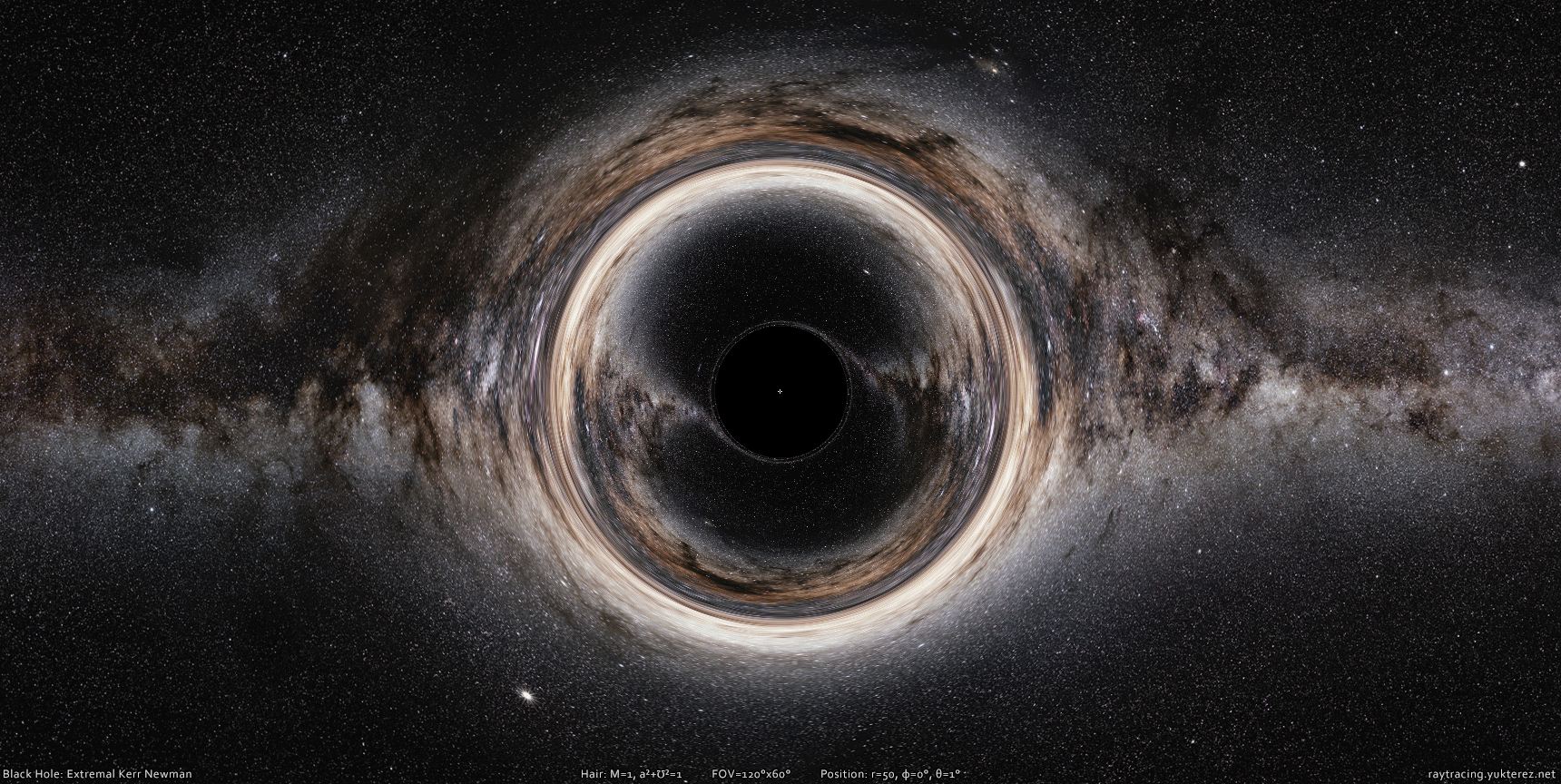
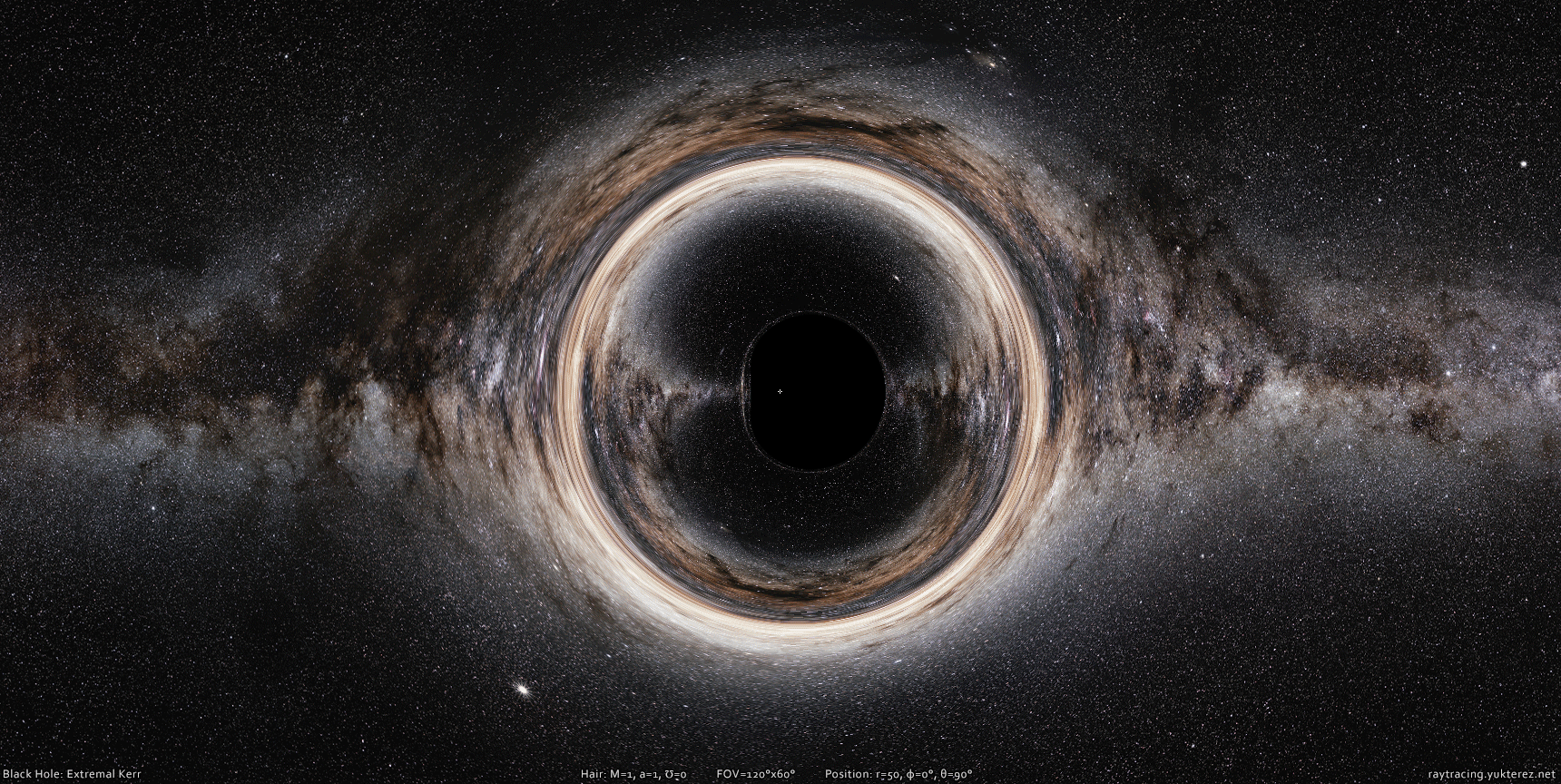
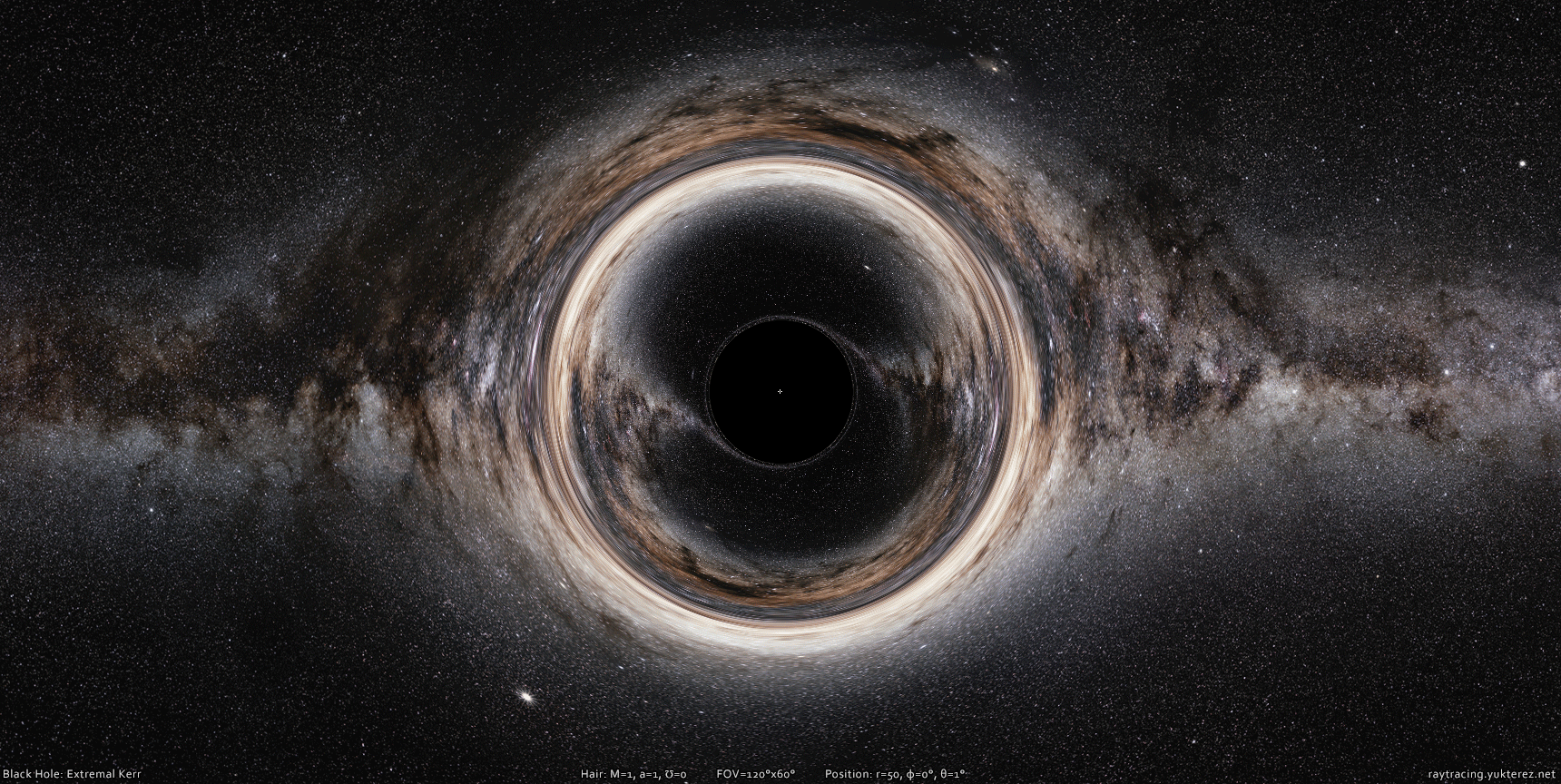
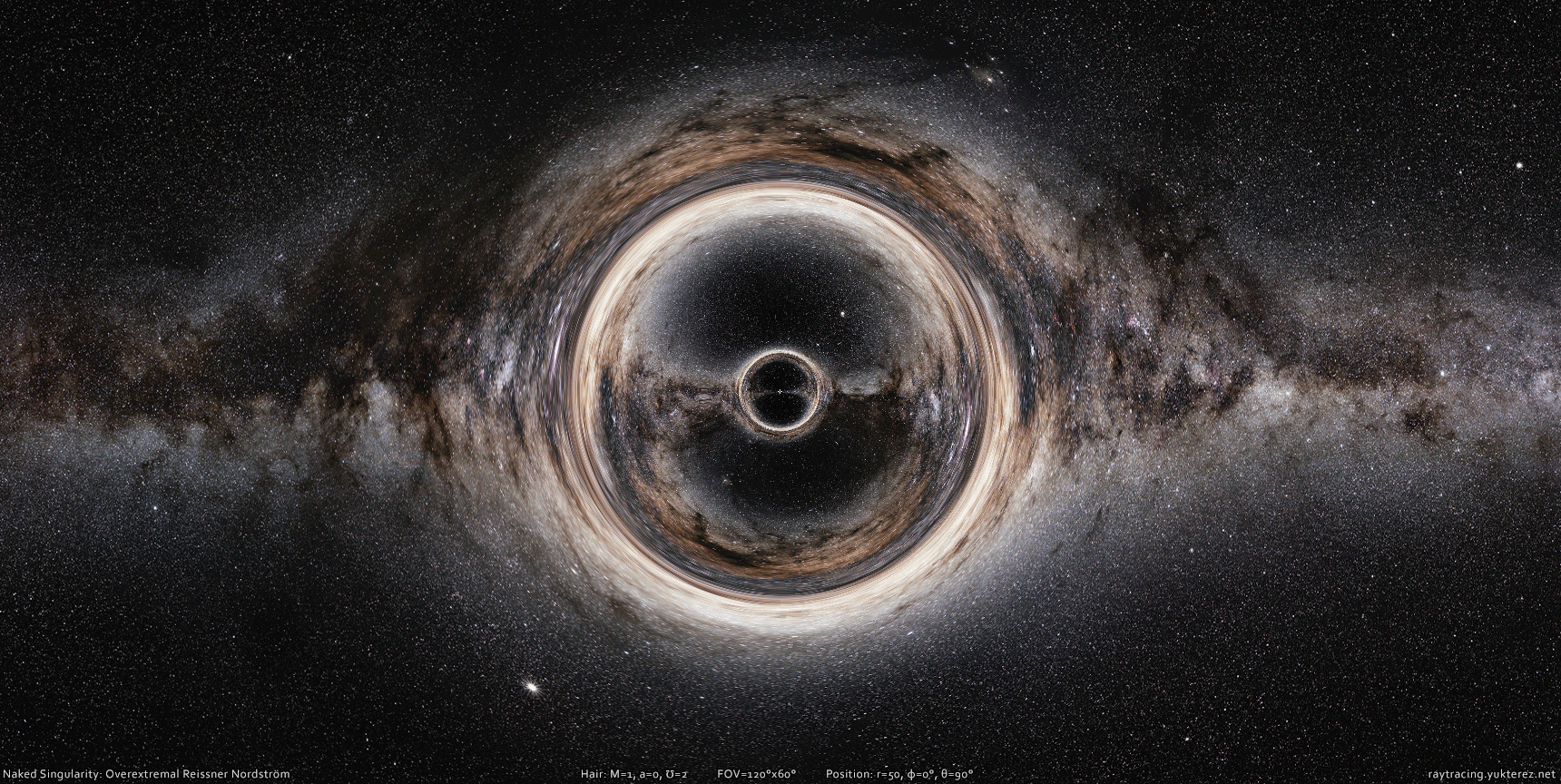
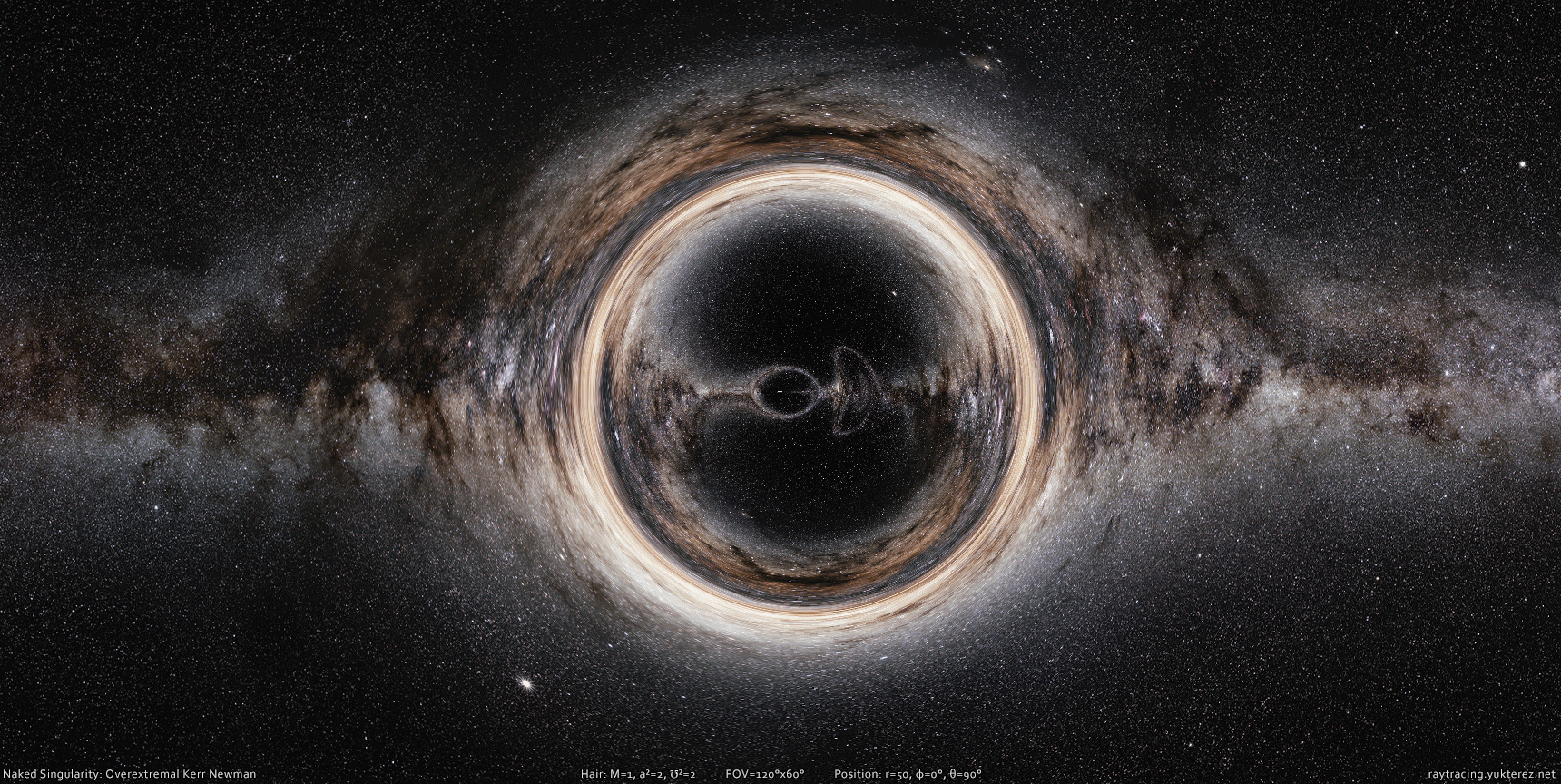
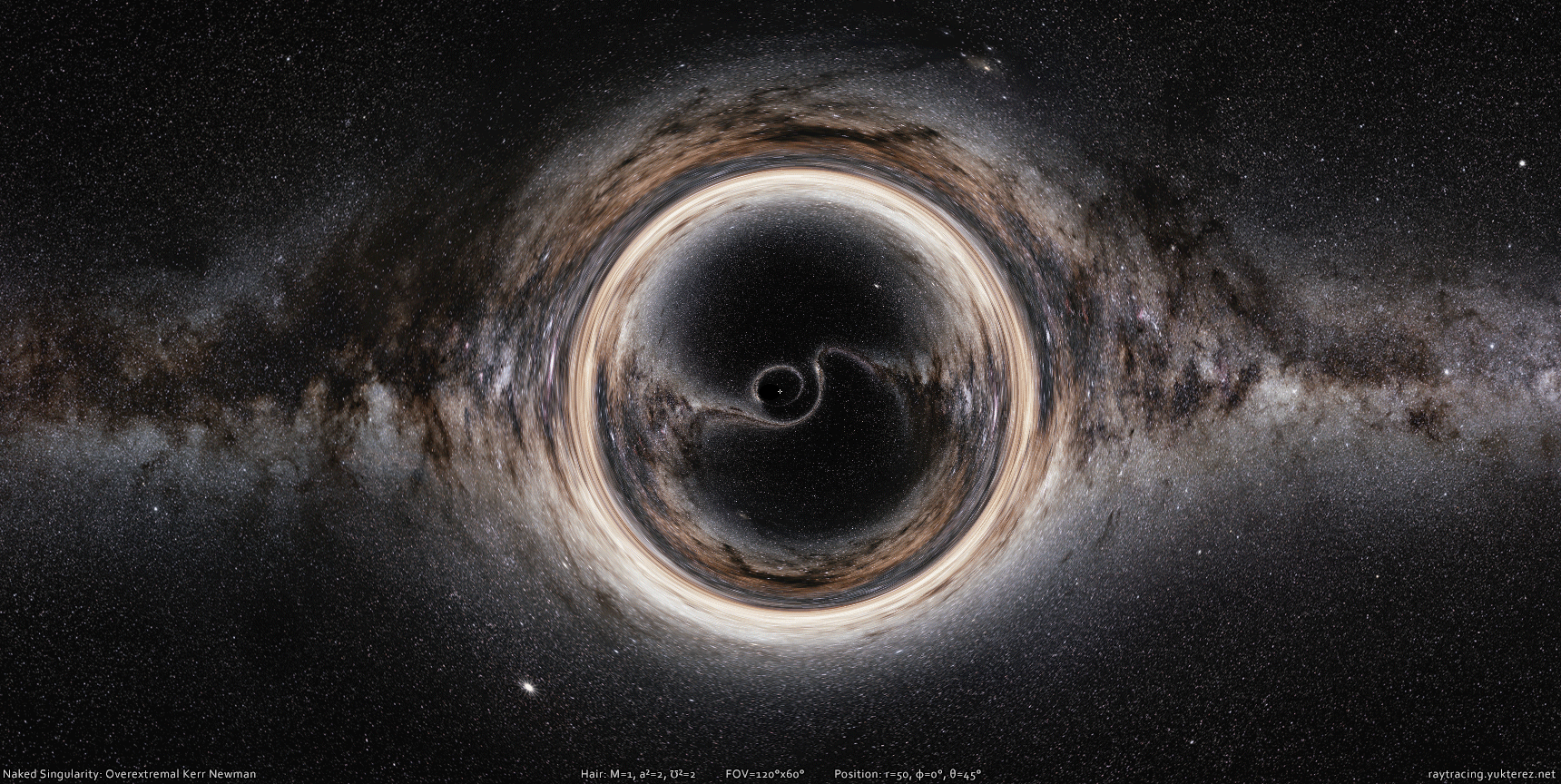
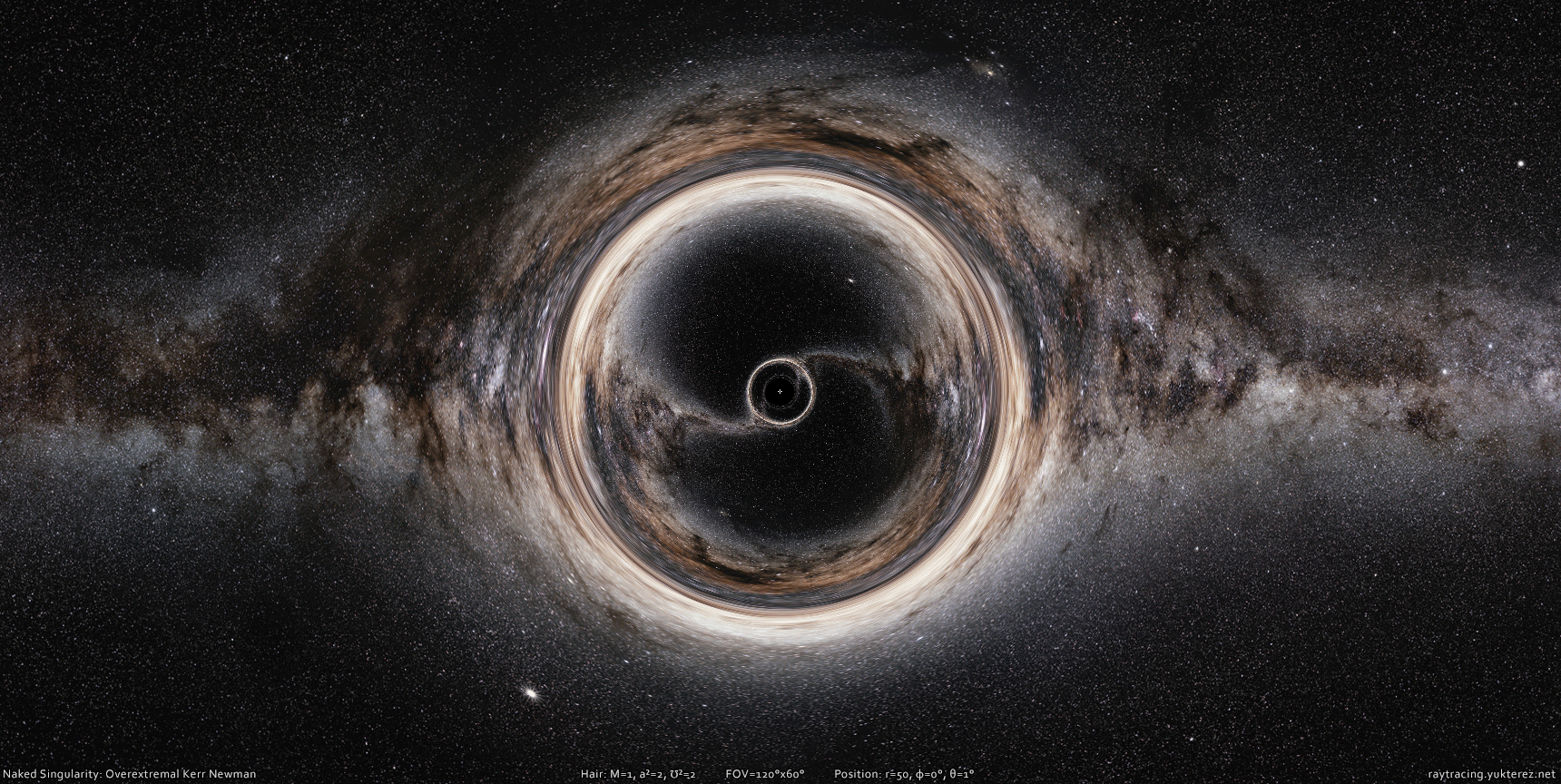
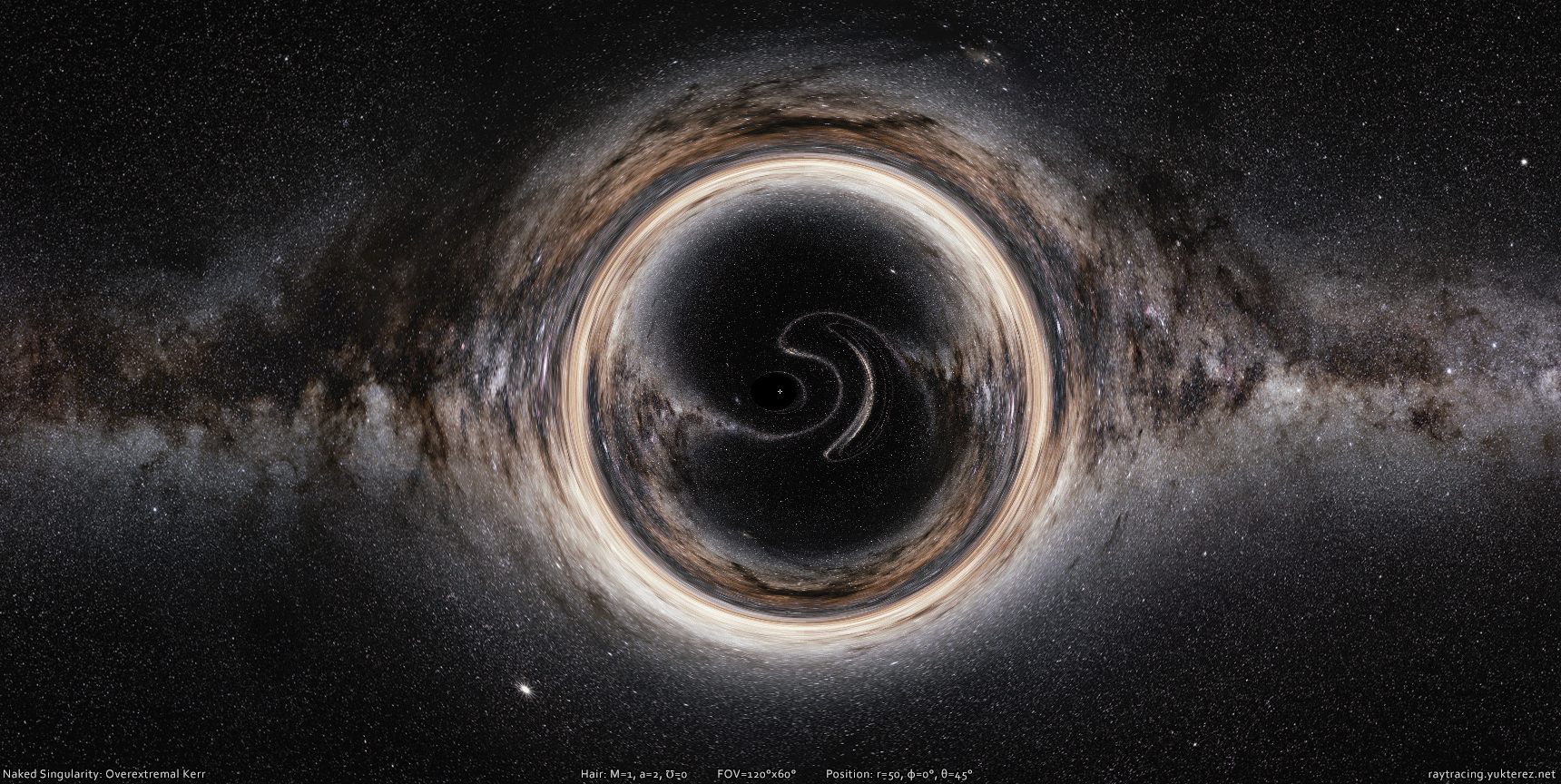
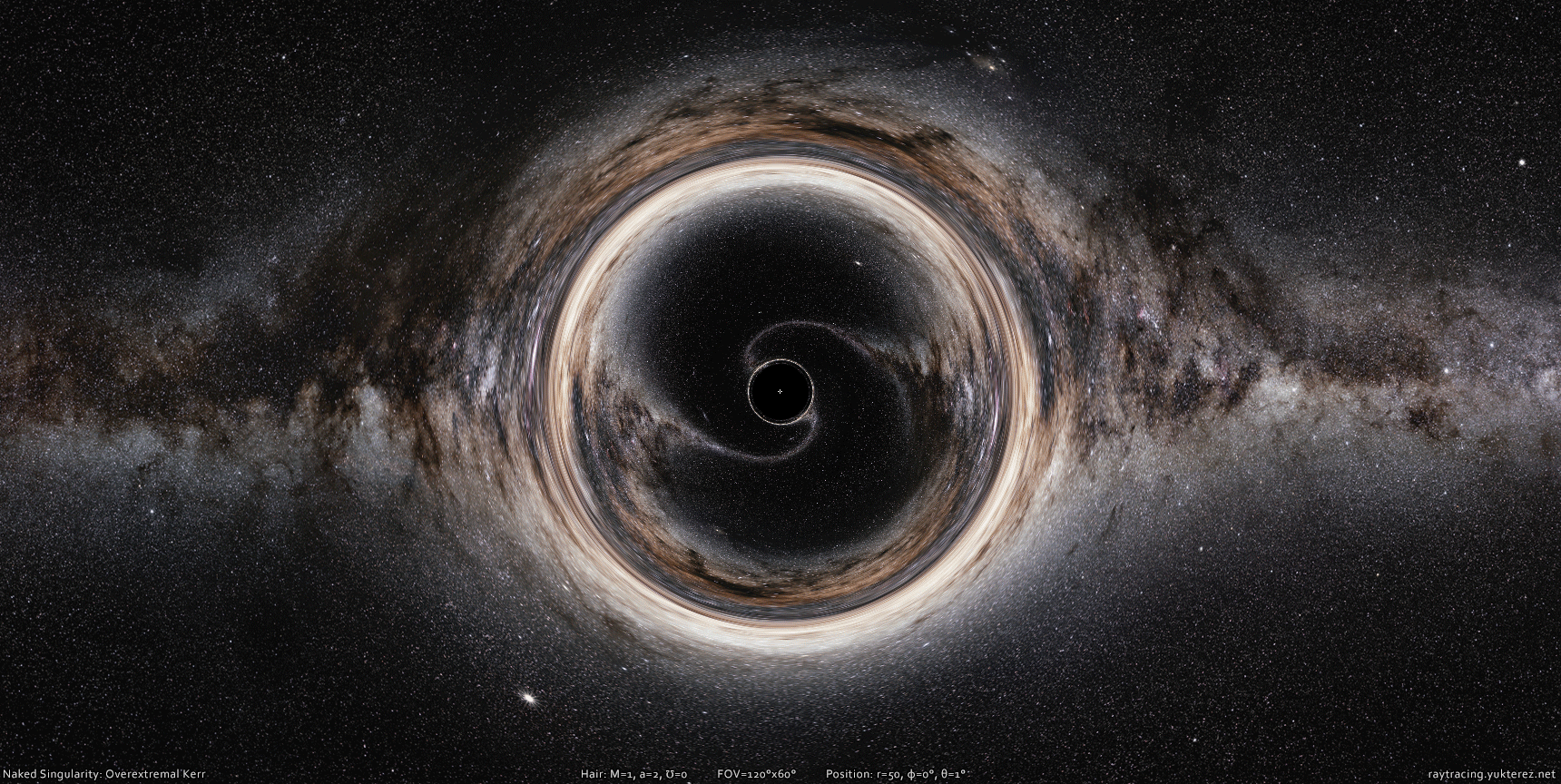
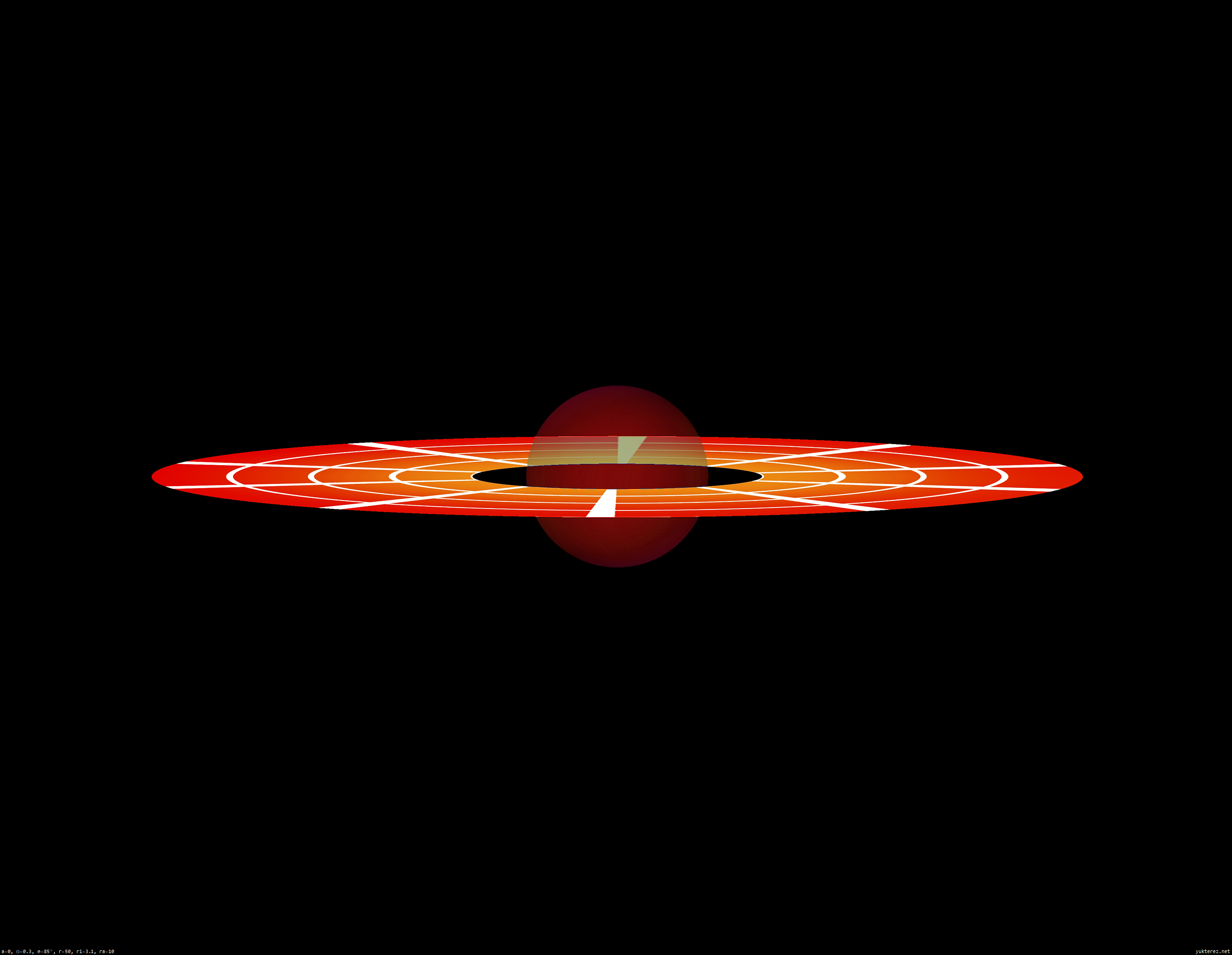
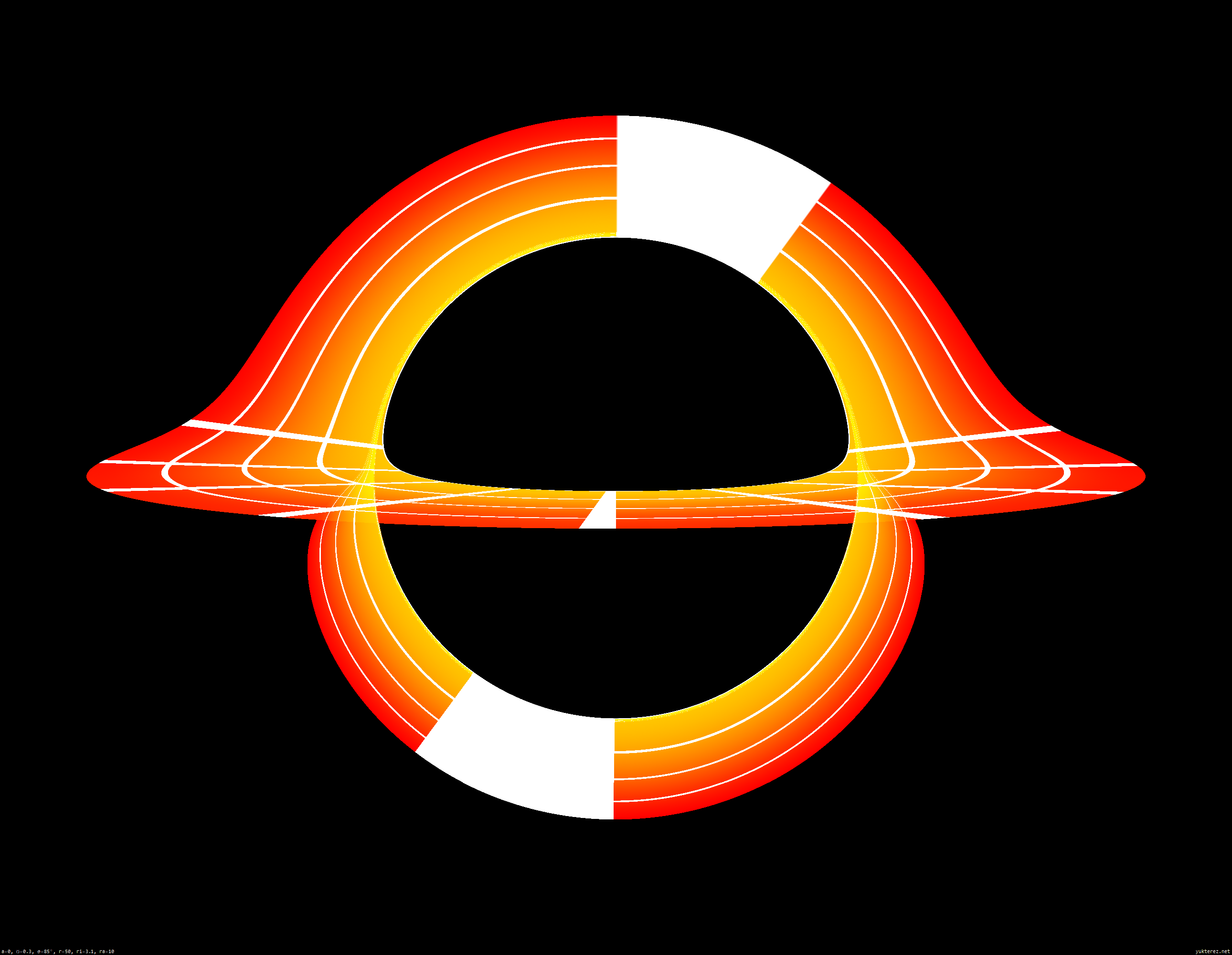
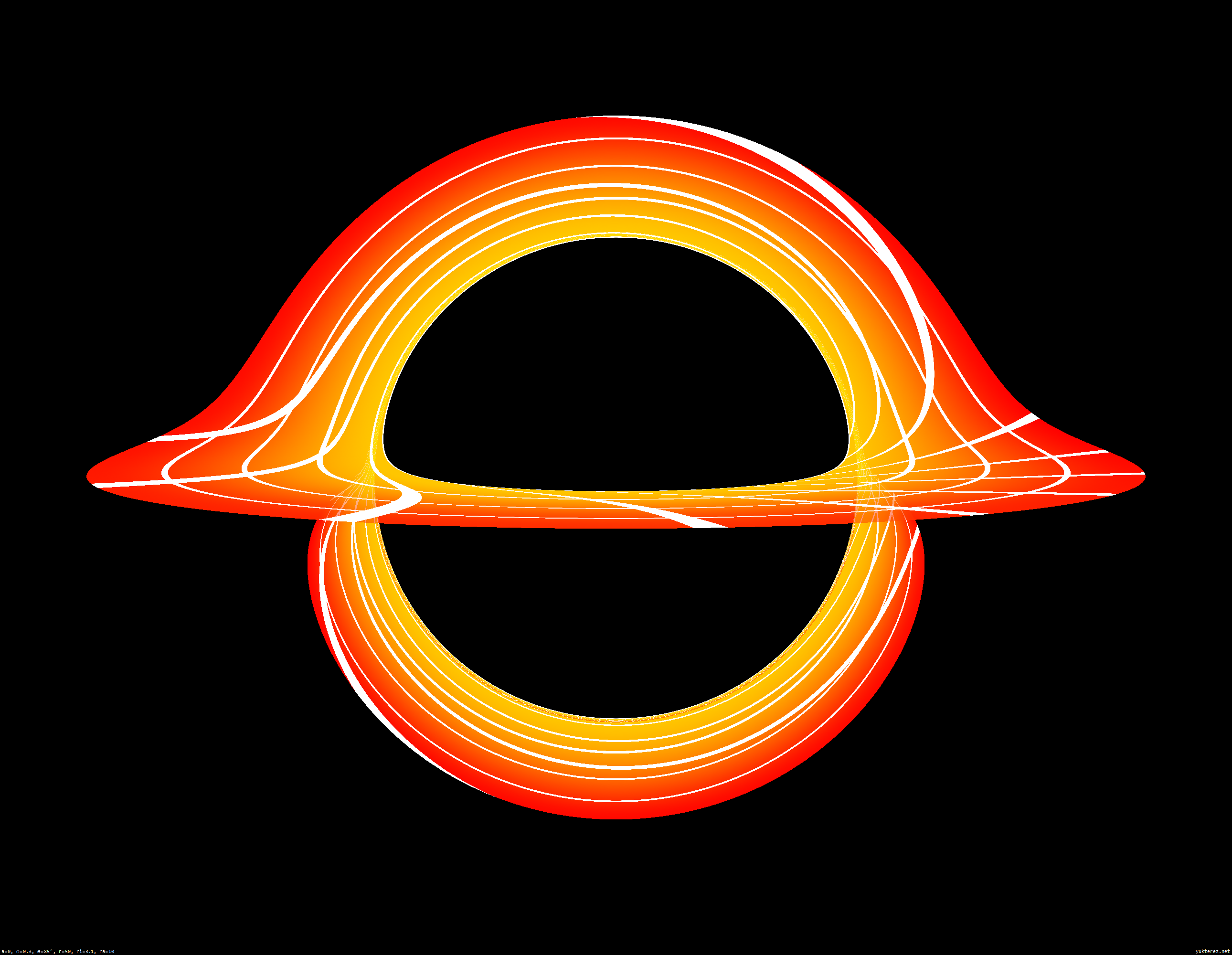
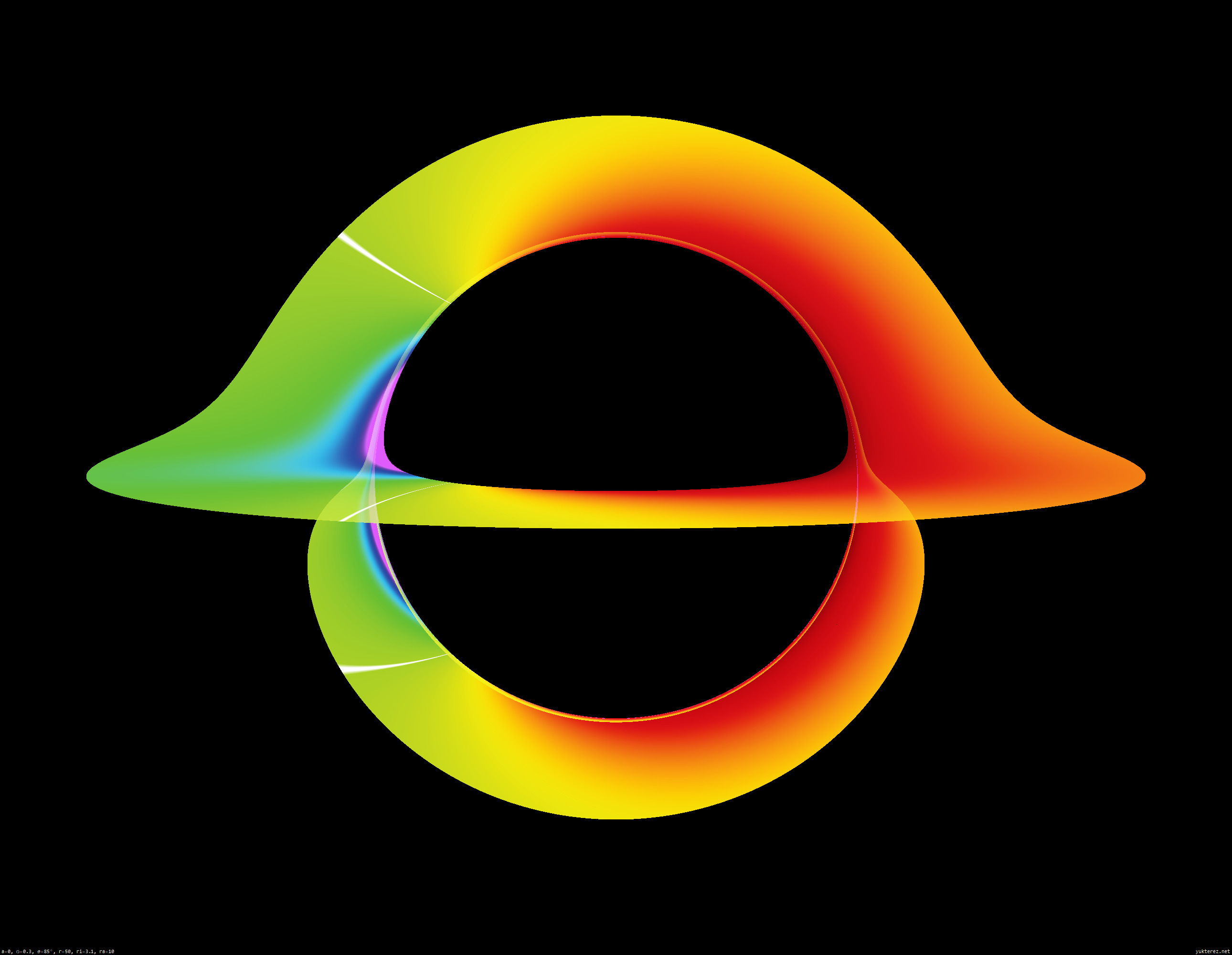
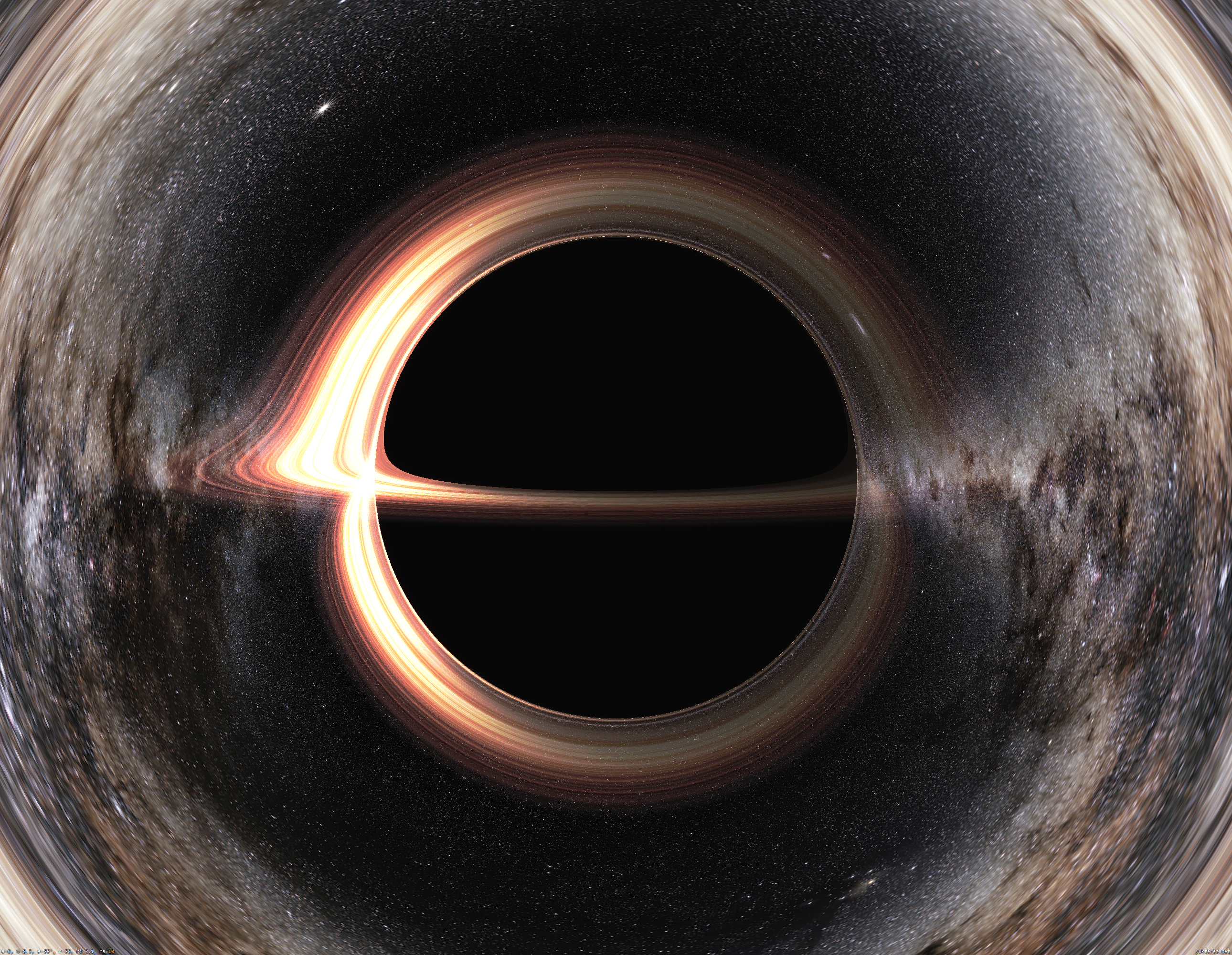
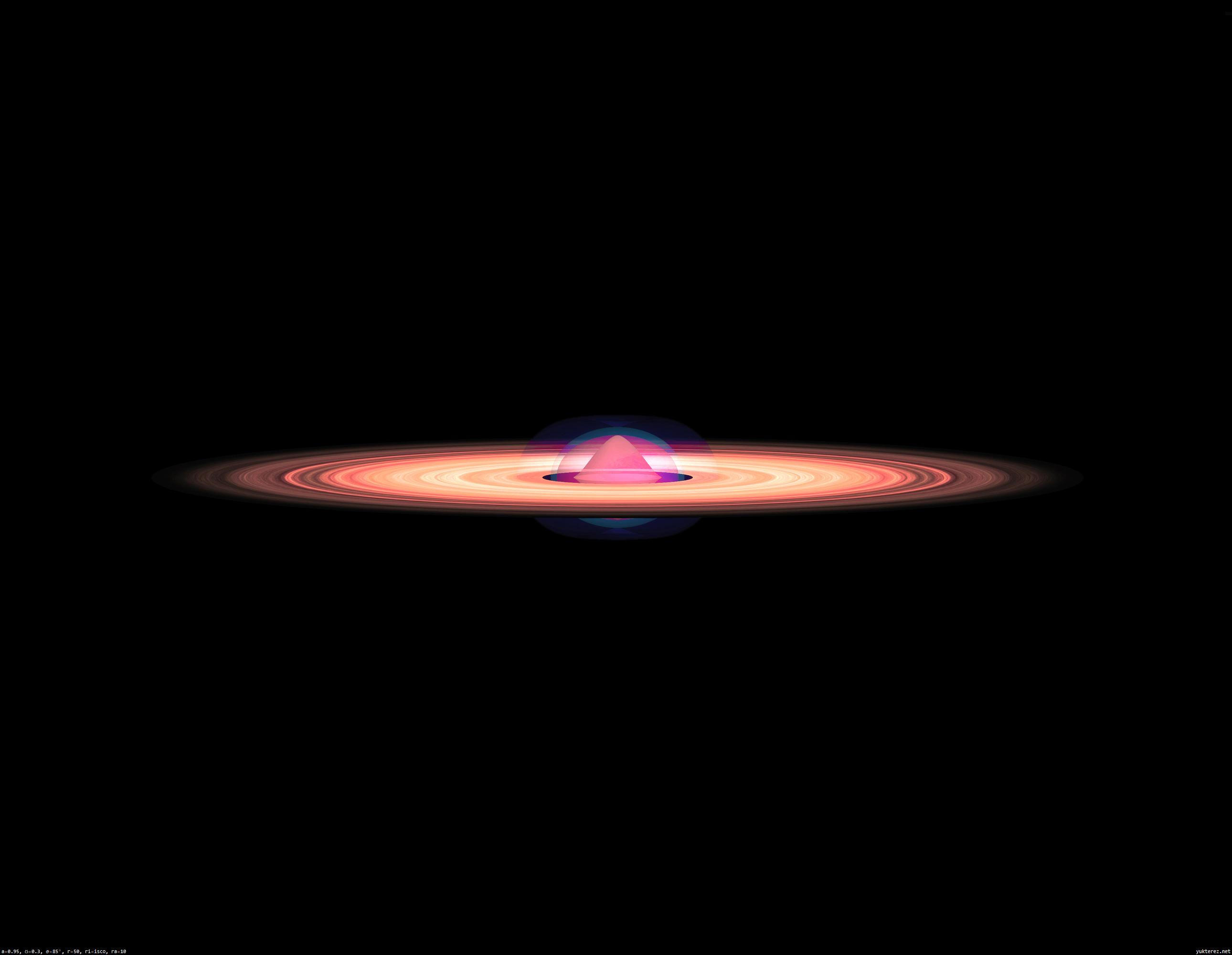
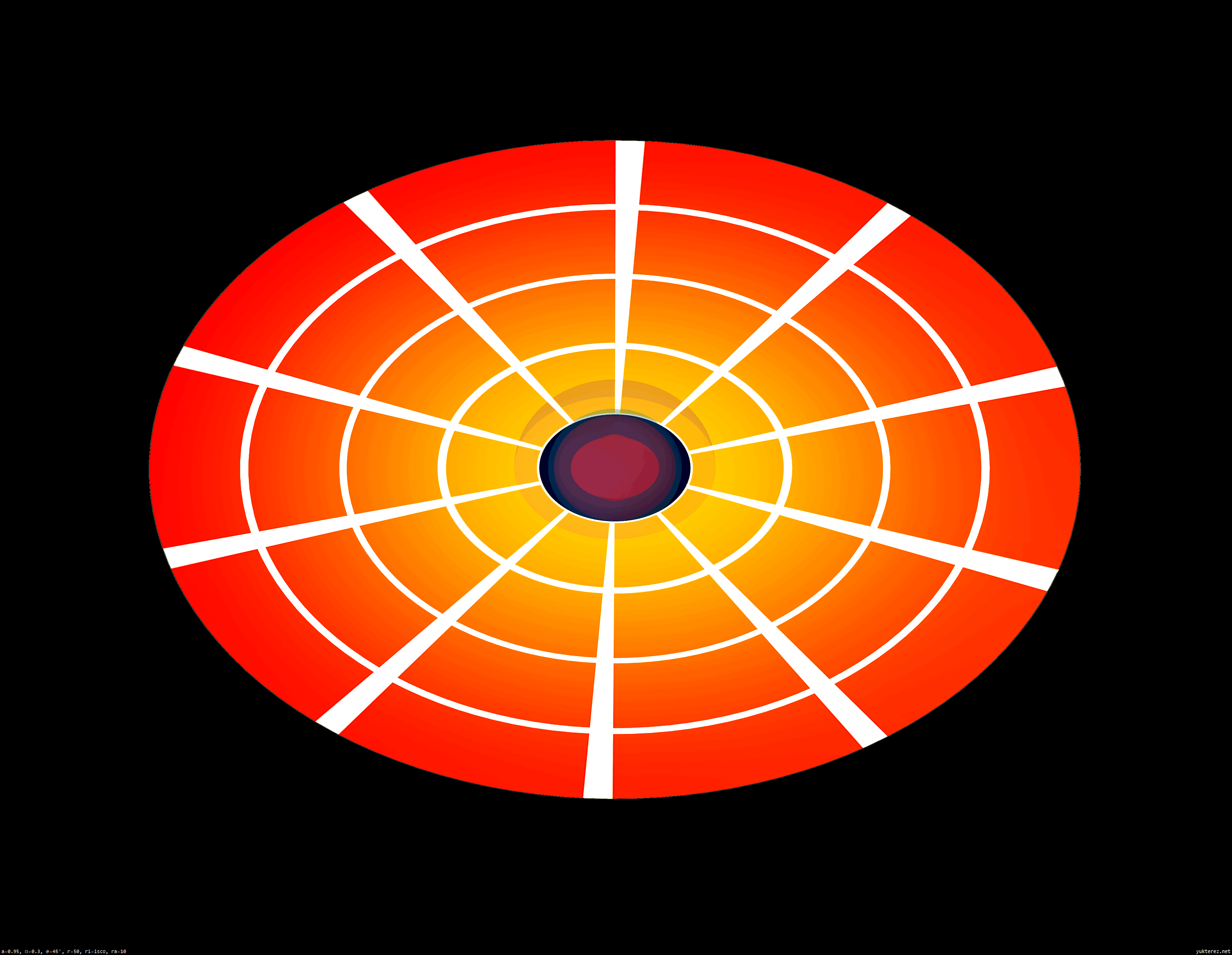
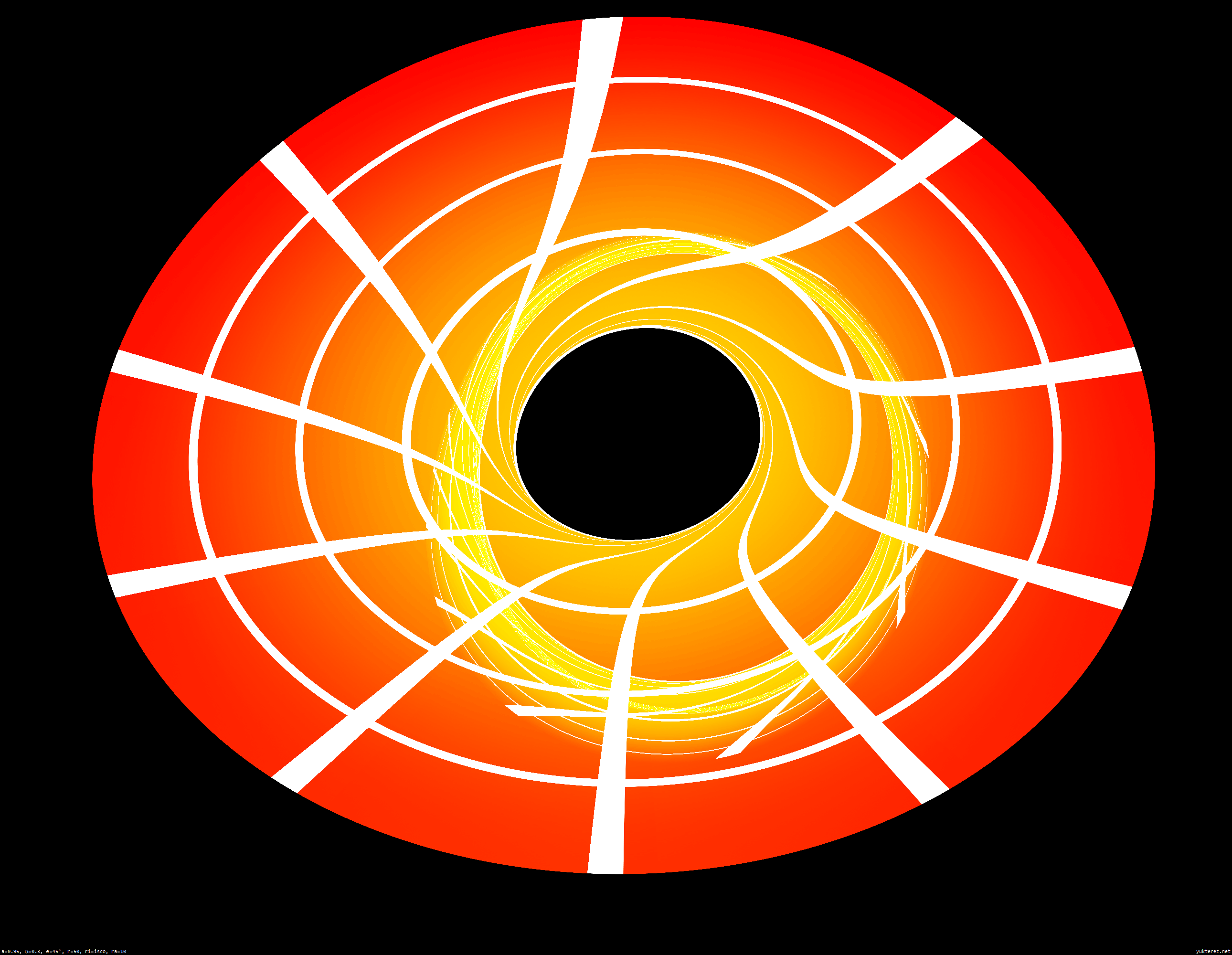
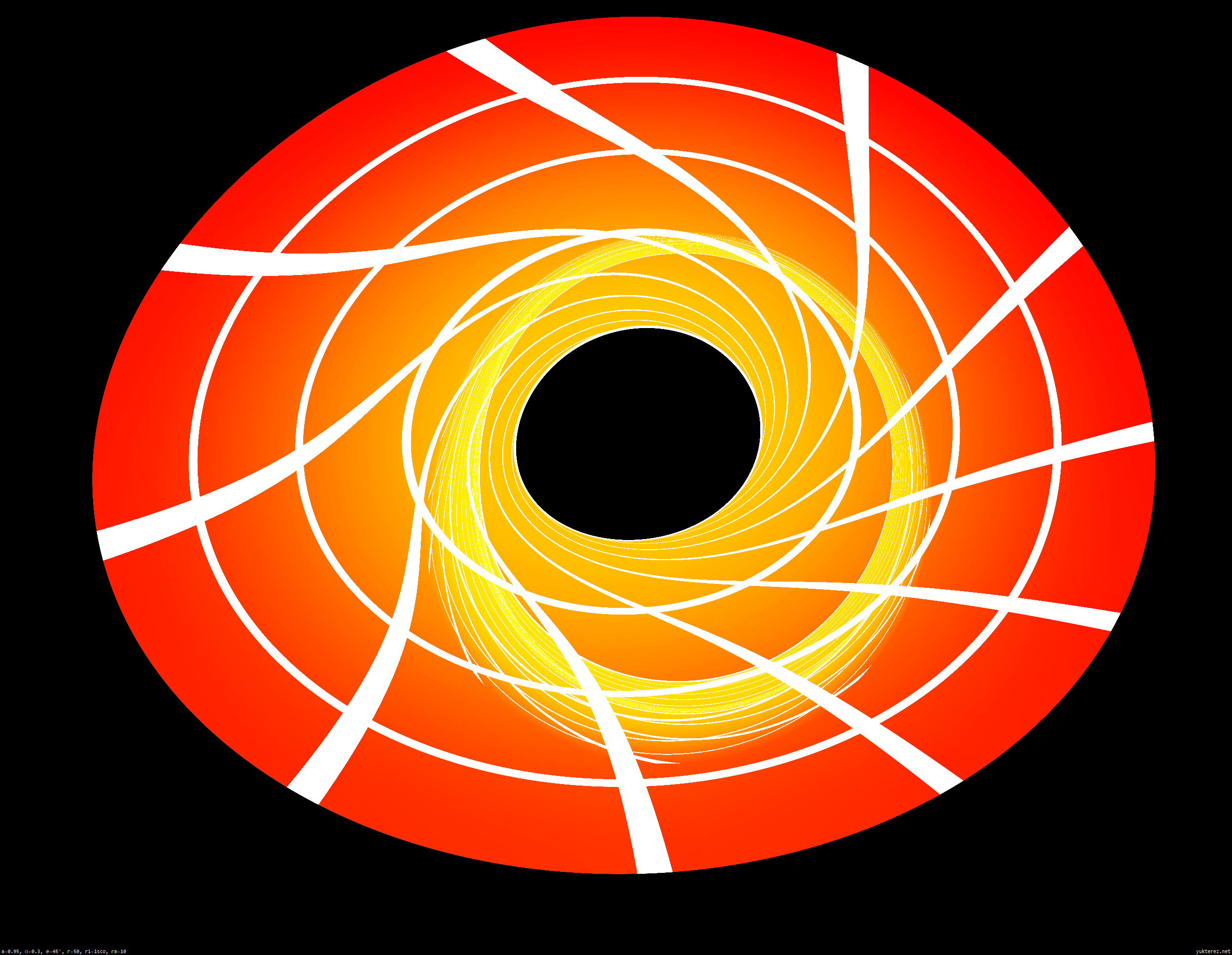
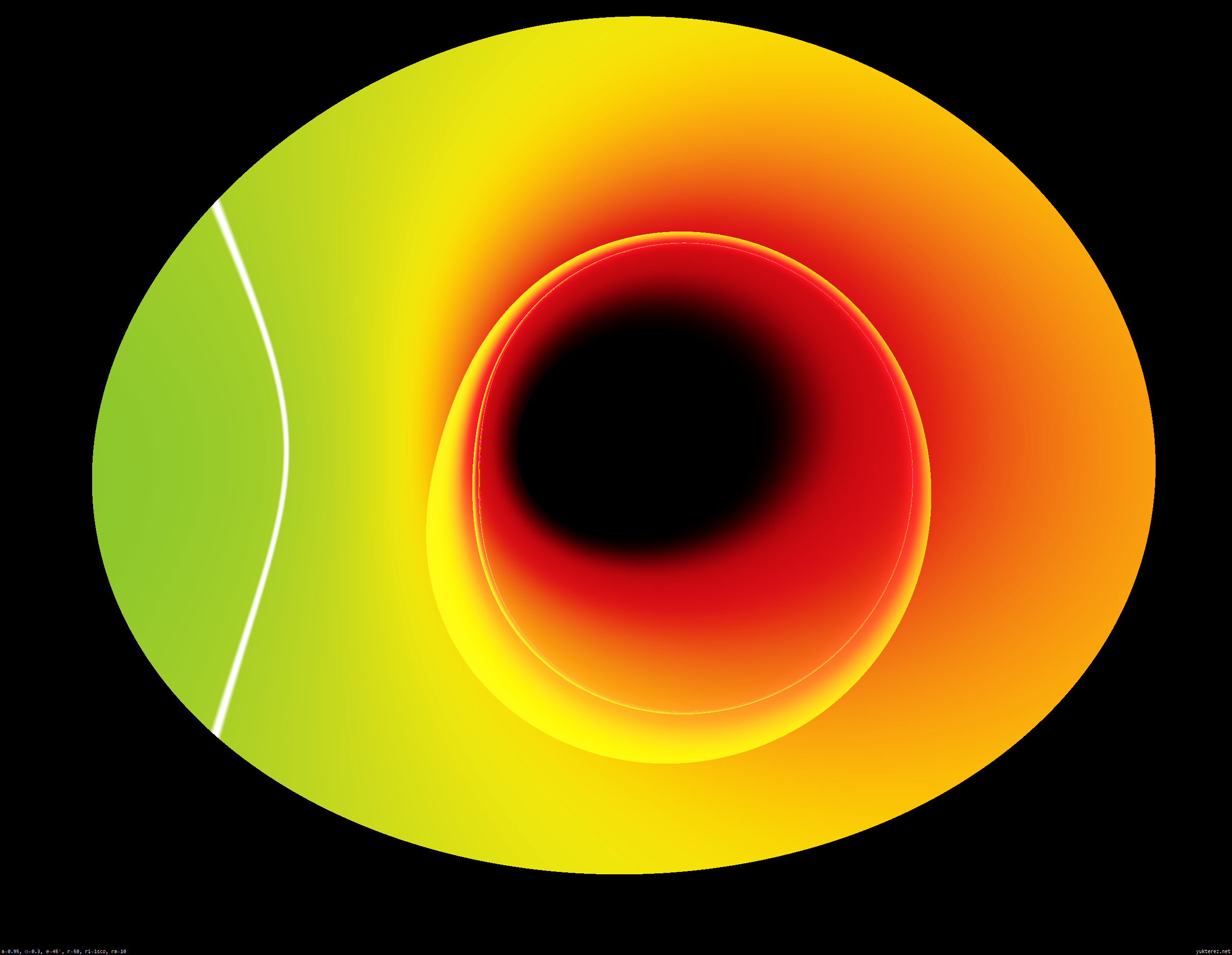
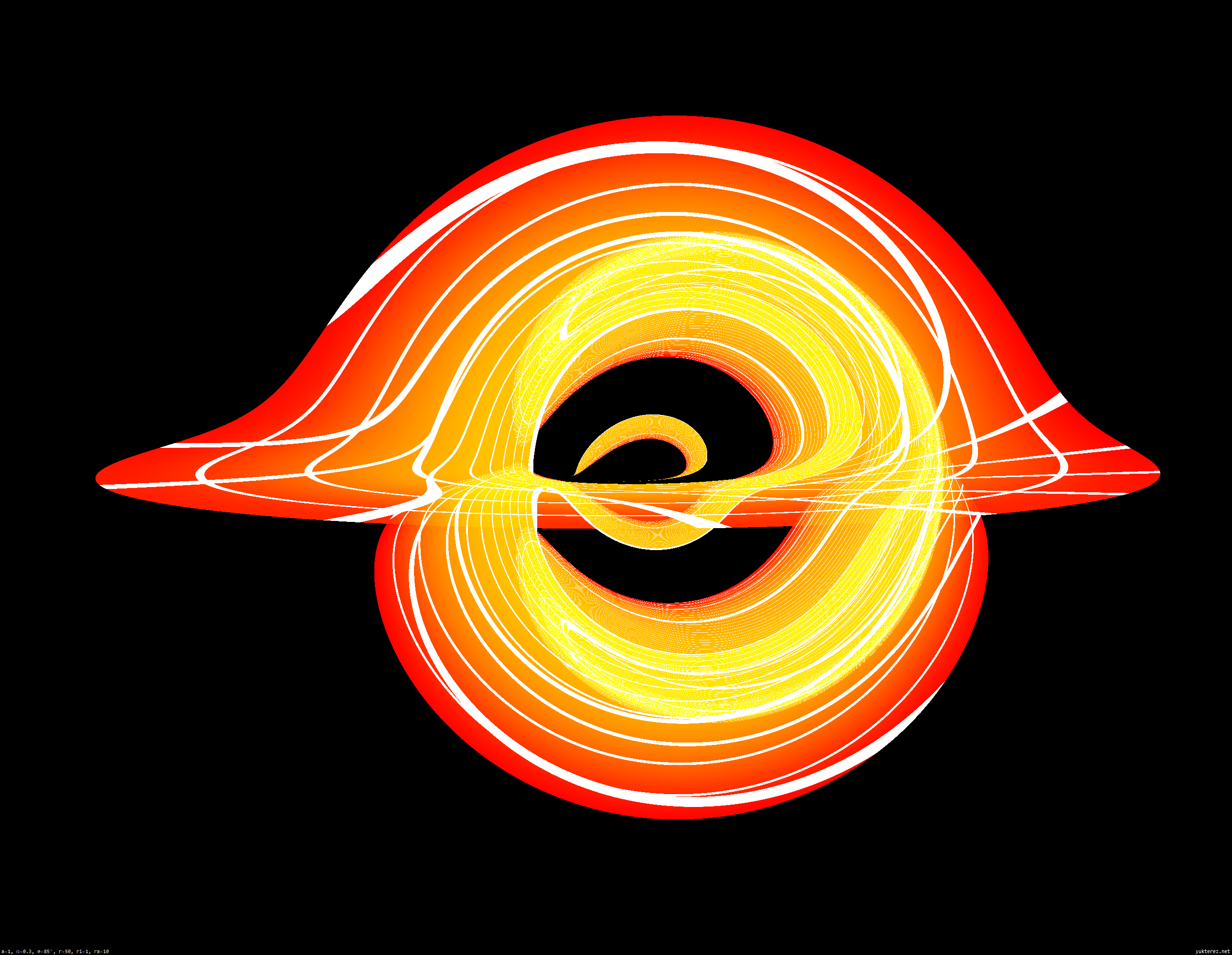
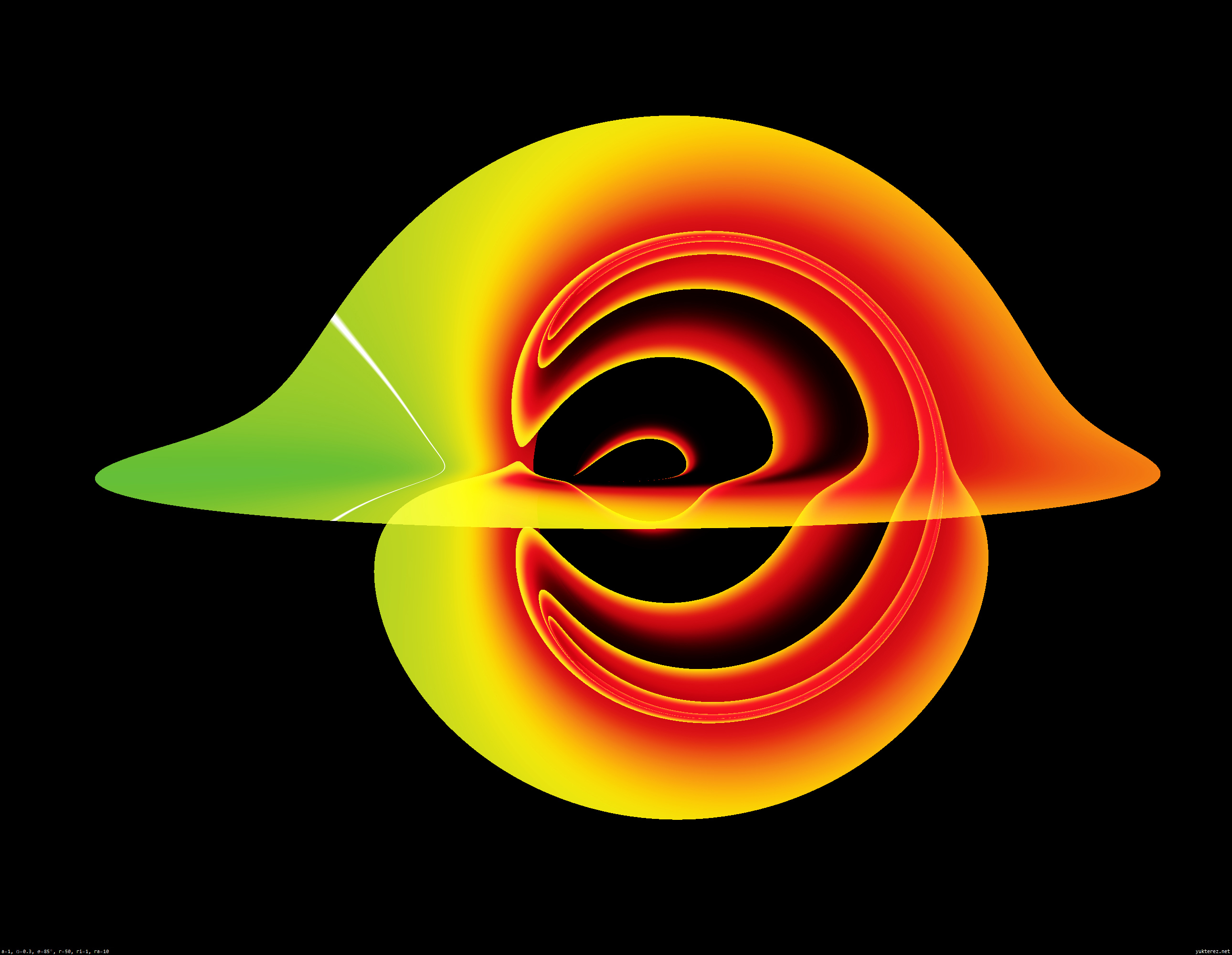
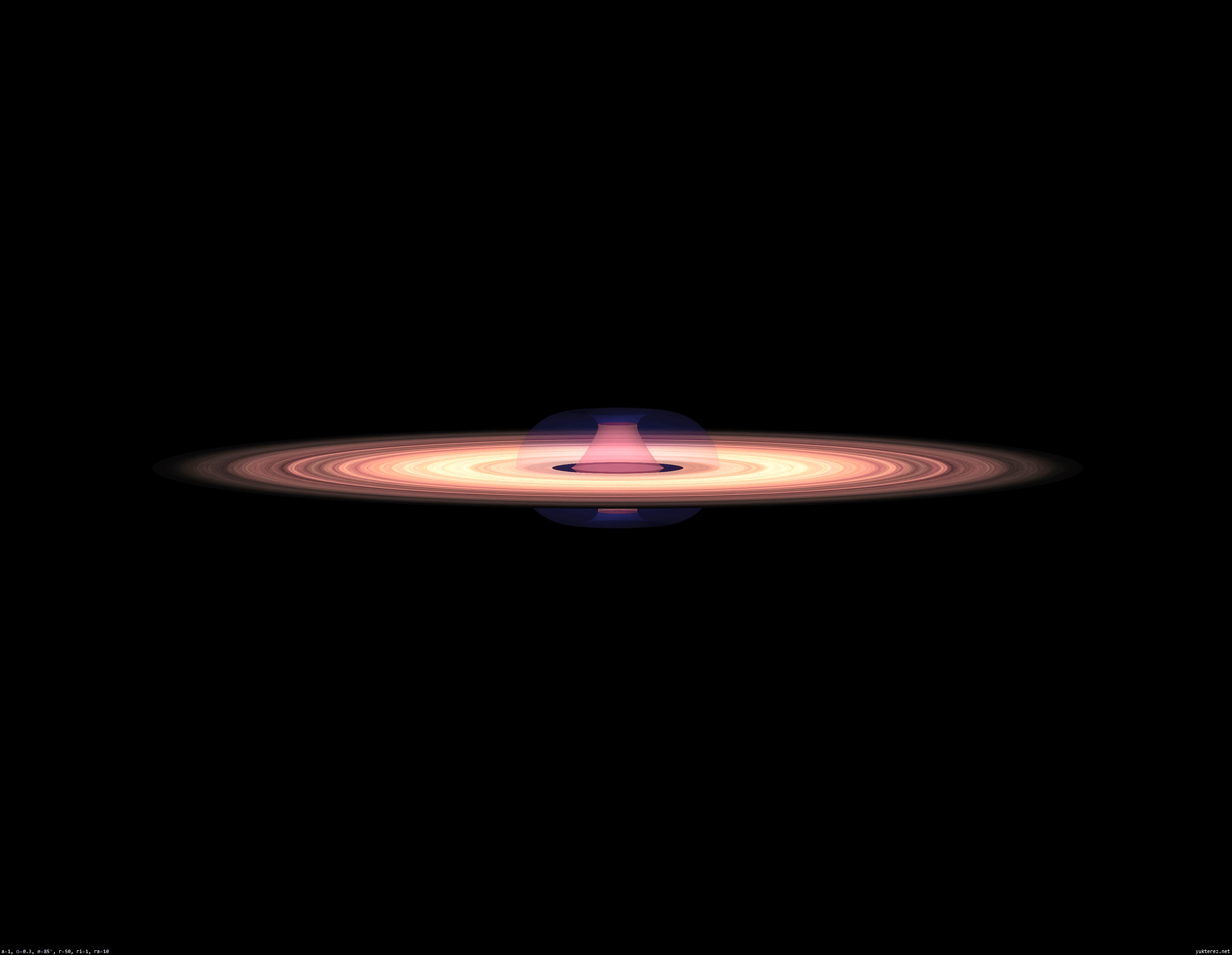
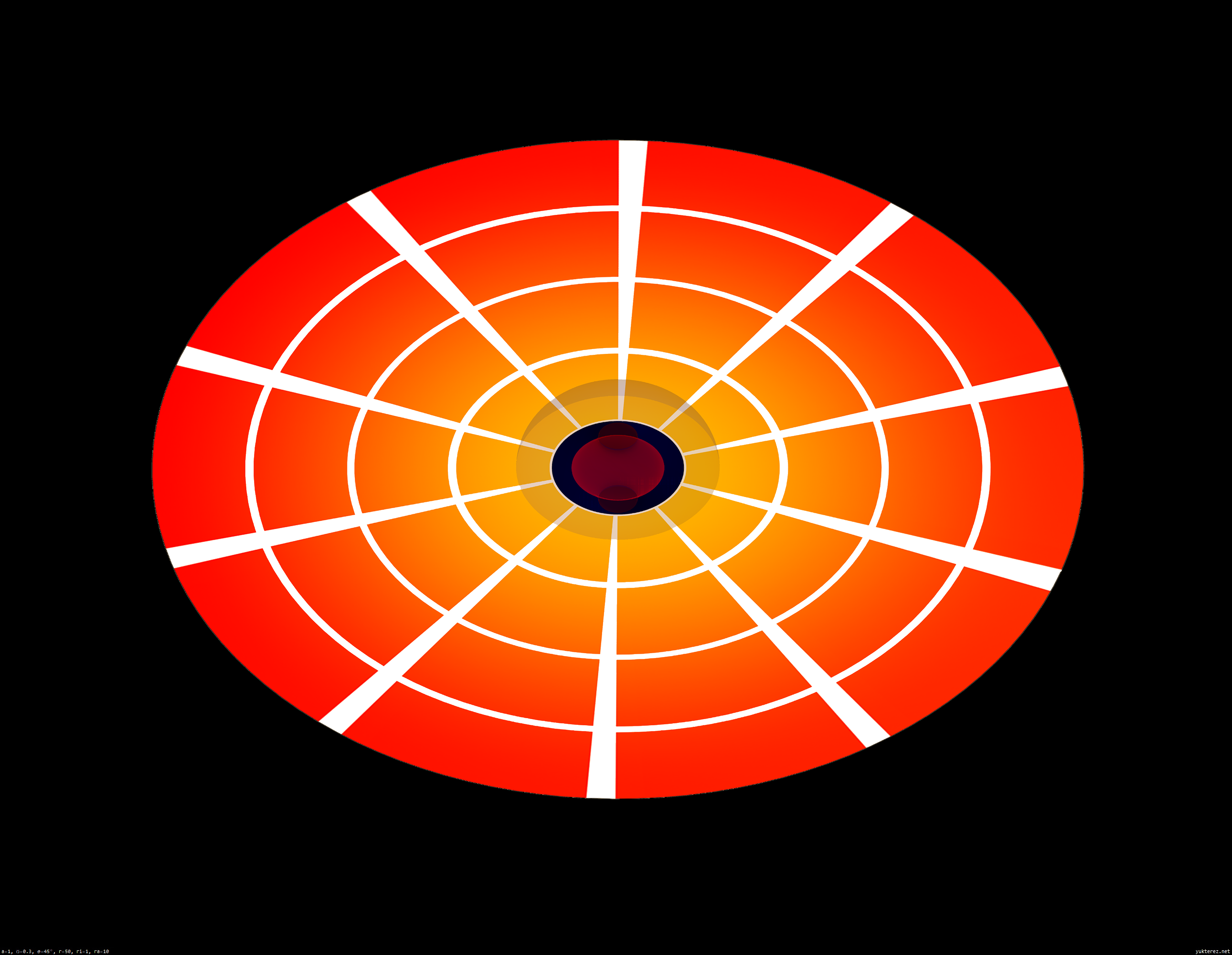
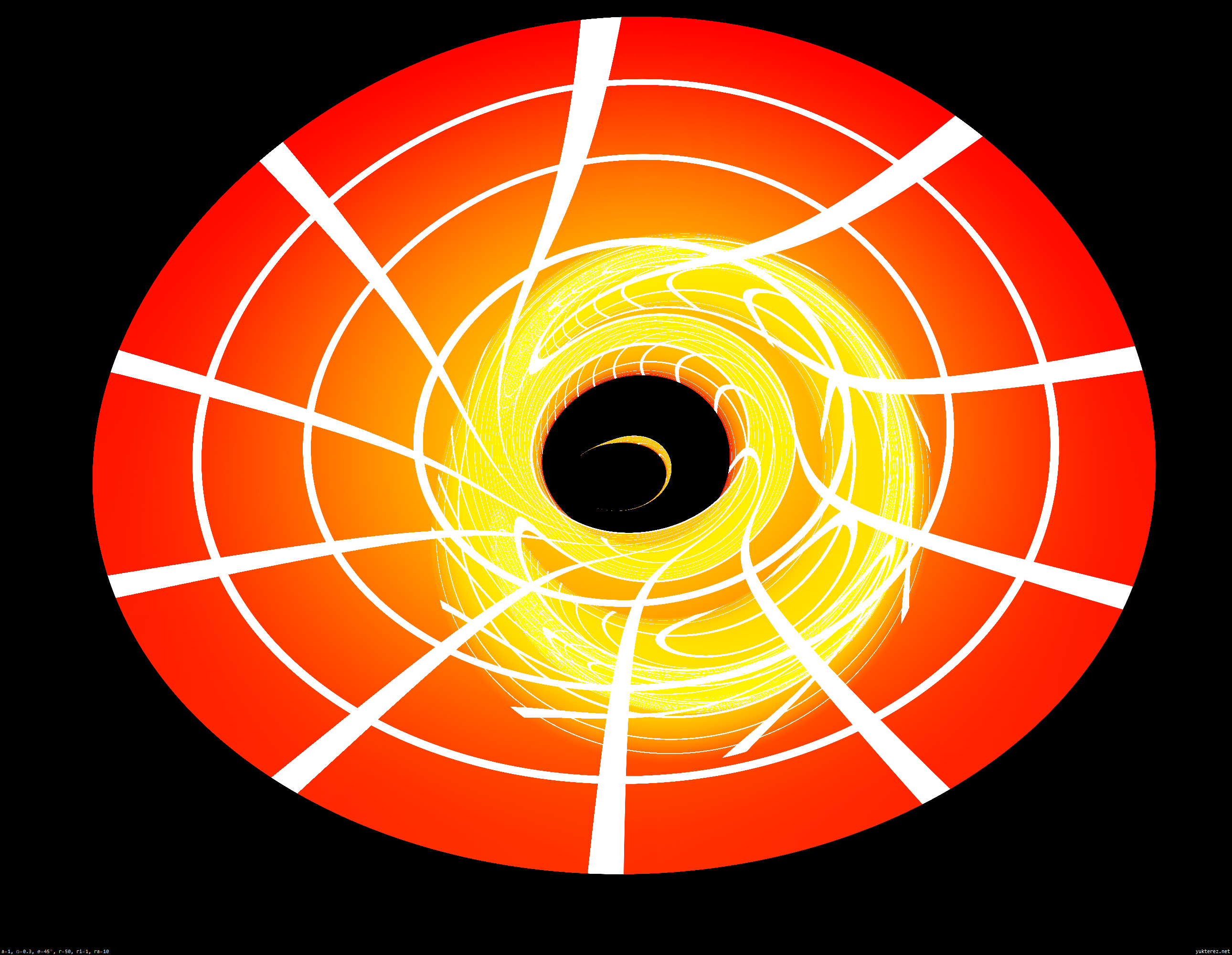
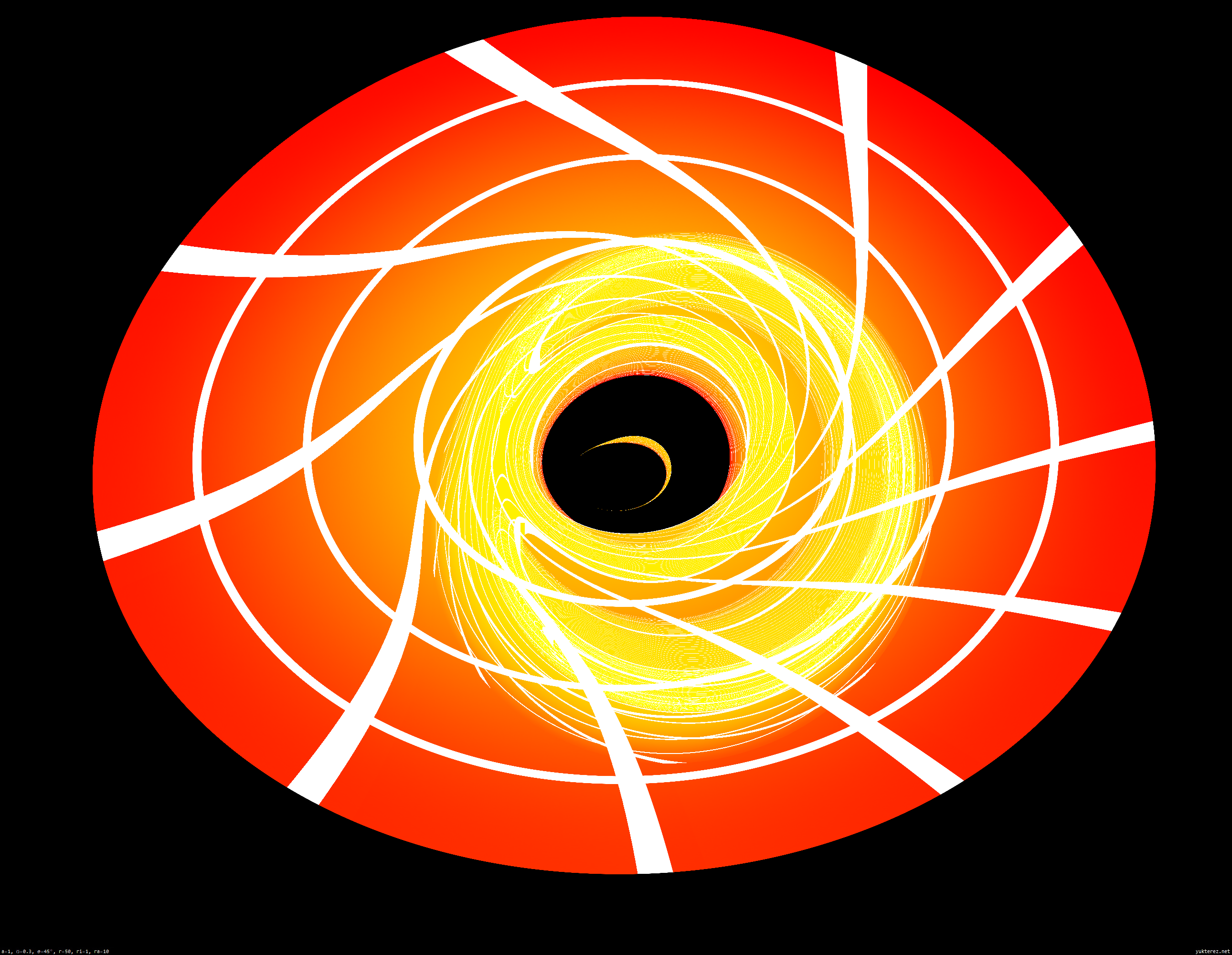
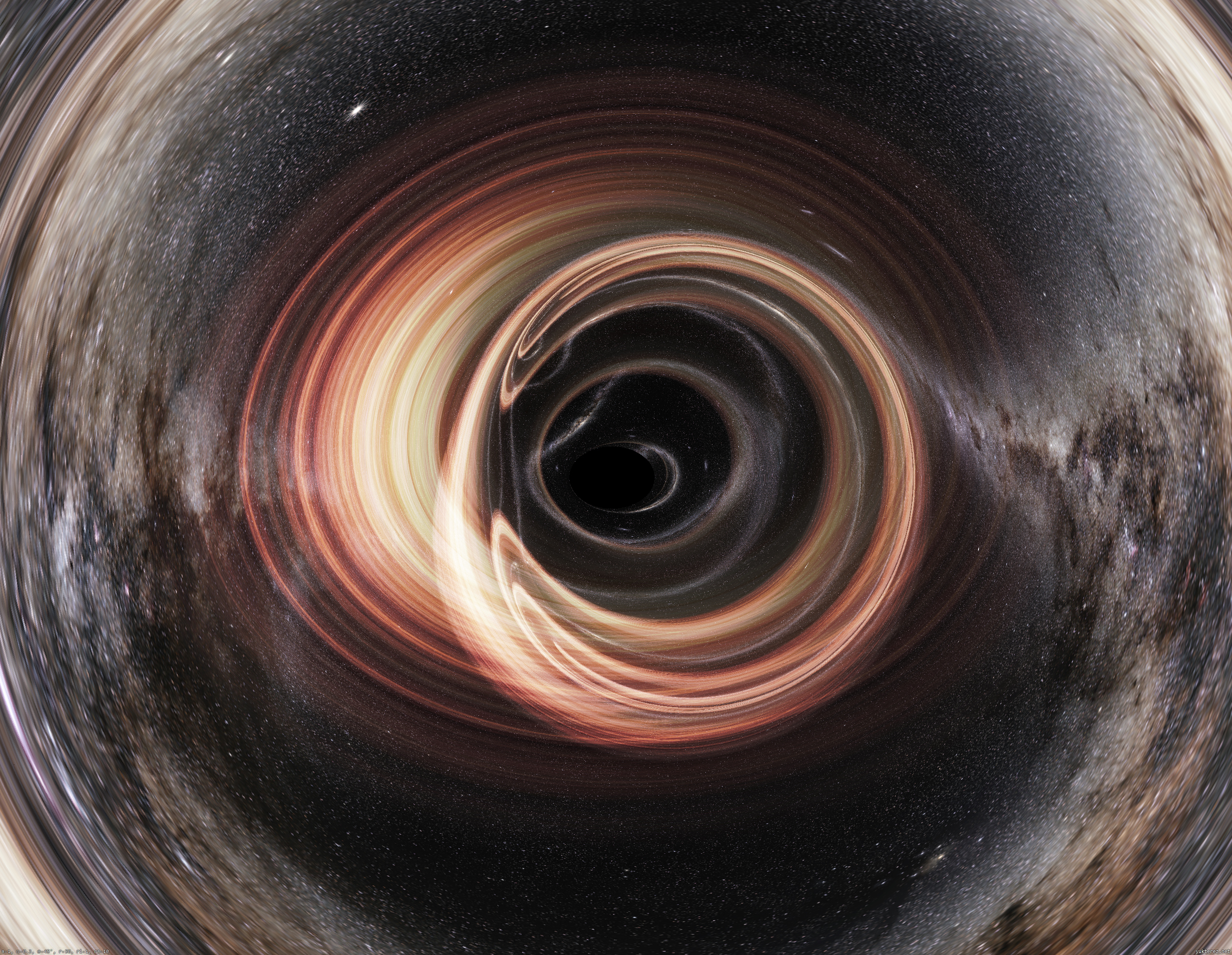
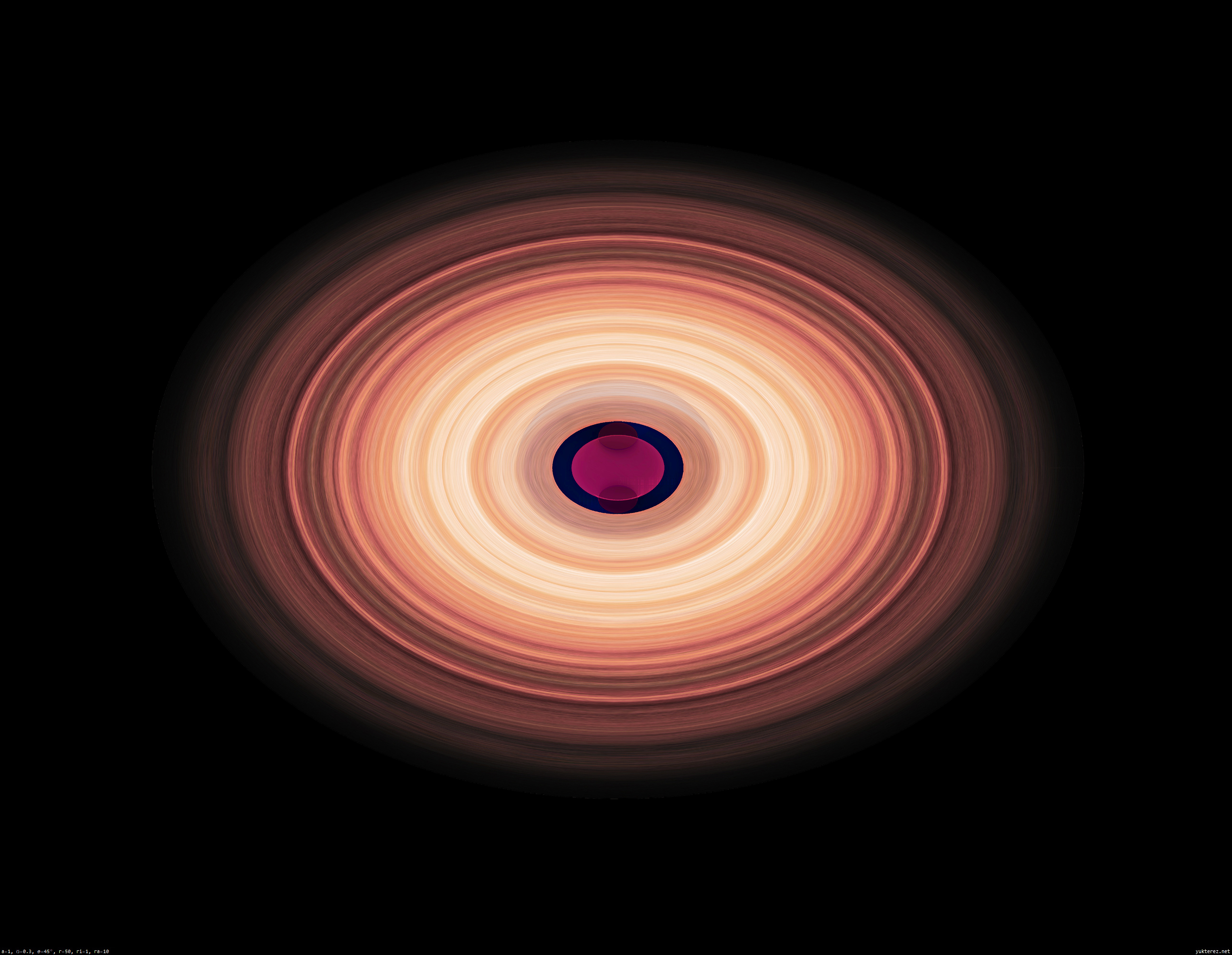
English versions will be available on en.yukterez.net and yukipedia. Last update: 9.9.2020Simulator in Boyer Lindquist Koordinaten: die Geschwindigkeit des Beobachters wird relativ zum lokalen ZAMO eingegeben; ein negatives vr steht für eine radiale Bewegung auf das schwarze Loch zu und ein positives von ihm weg, ein positives vφ für eine prograde und ein negatives für eine retrograde, und ein positives vθ im Bereich φ=-π/2..+π/2 für eine Bewegung in Richtung Südpol, und ein negatives in Richtung Nordpol. Output: gravitationsgelinstes Abbild einer starren (die weißen Hilfslinien stehen für konstante r und φ) und einer dynamisch rotierenden (die radialen Hilfslinien werden entsprechend der lokalen Frame Dragging Geschwindigkeit und der Lichtlaufzeit zum Beobachter verquirlt) Akkretionsscheibe (sowohl als Composite als auch der einzelnen Lichtechos), gravitationsgelinster Sternenhintergrund, Abbild einer knapp über dem Horizont aufgespannten und korotierenden Schale, Frequenzverschiebung von Scheibe und Hintergrund, Konturen des Schattens:
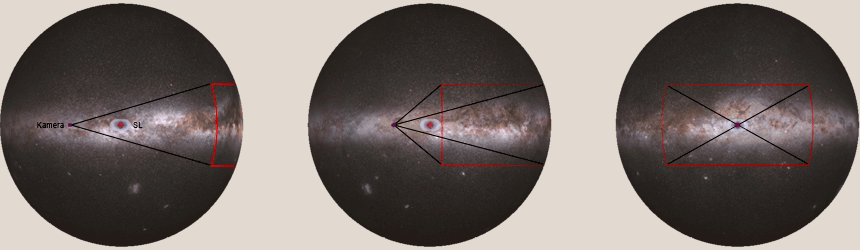
Wenn der Beobachter nahe oder hinter dem Horizont ist empfehlen sich Raindrop Doran Koordinaten (Beispiel: klick, Animation: .nb-File):
Transformation des Outputs im Plattkartenformat in die stereographische Projektion:
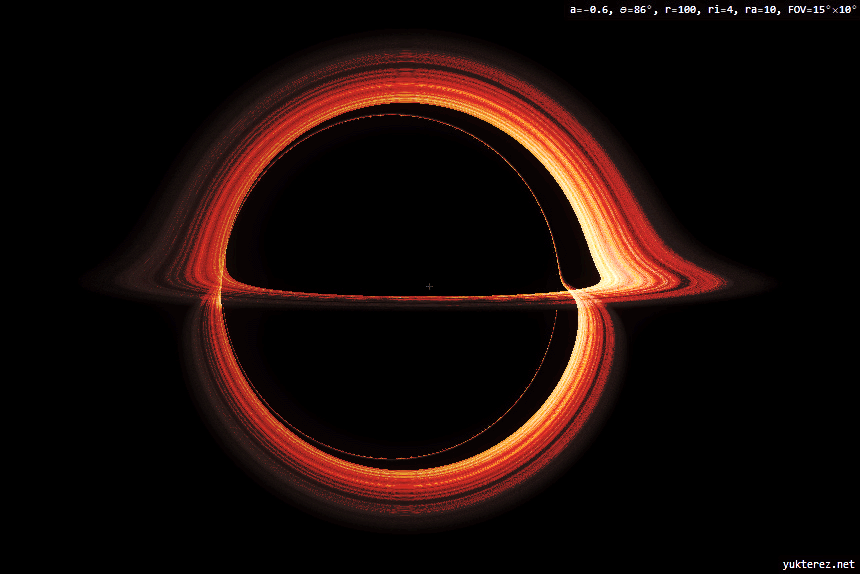
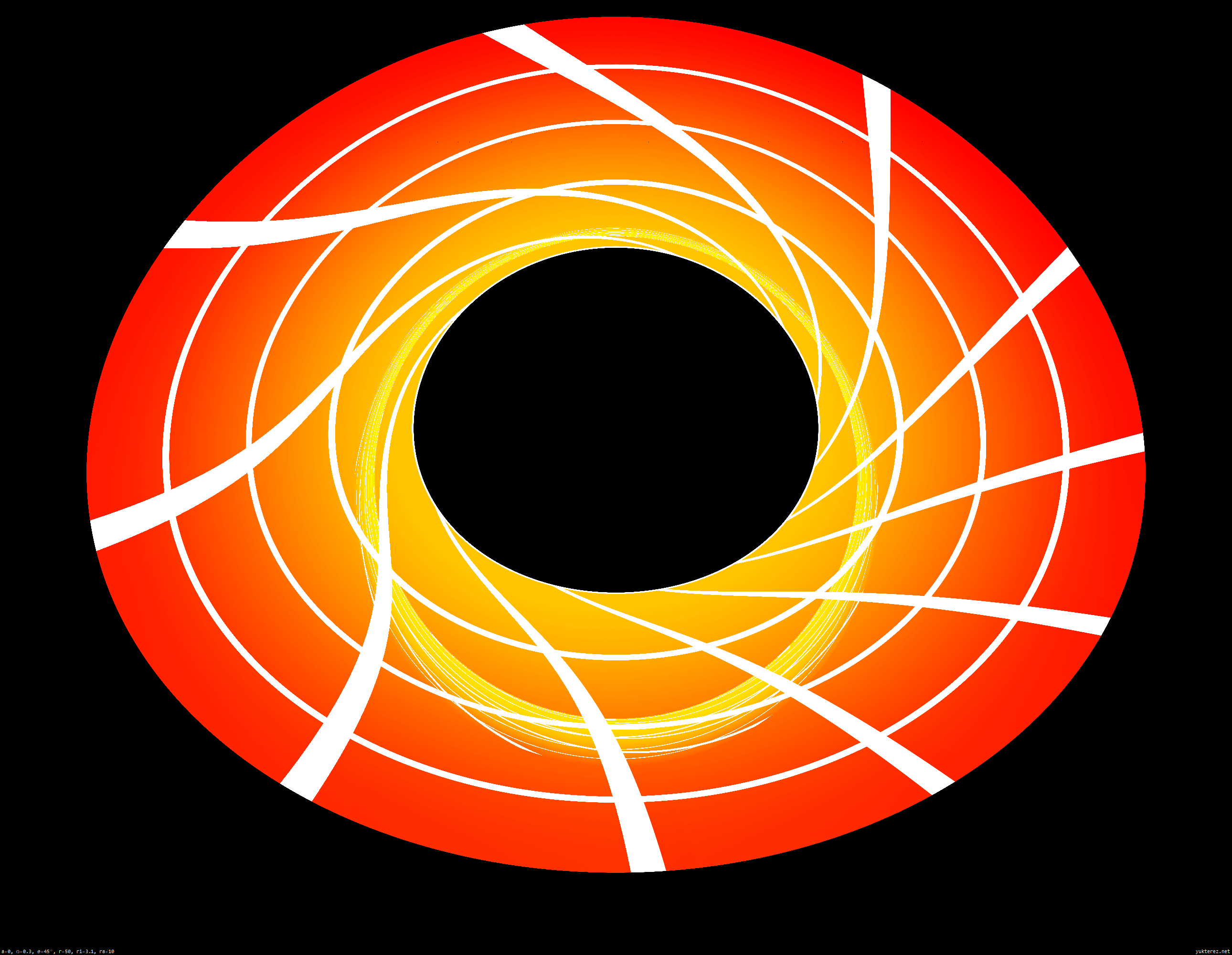
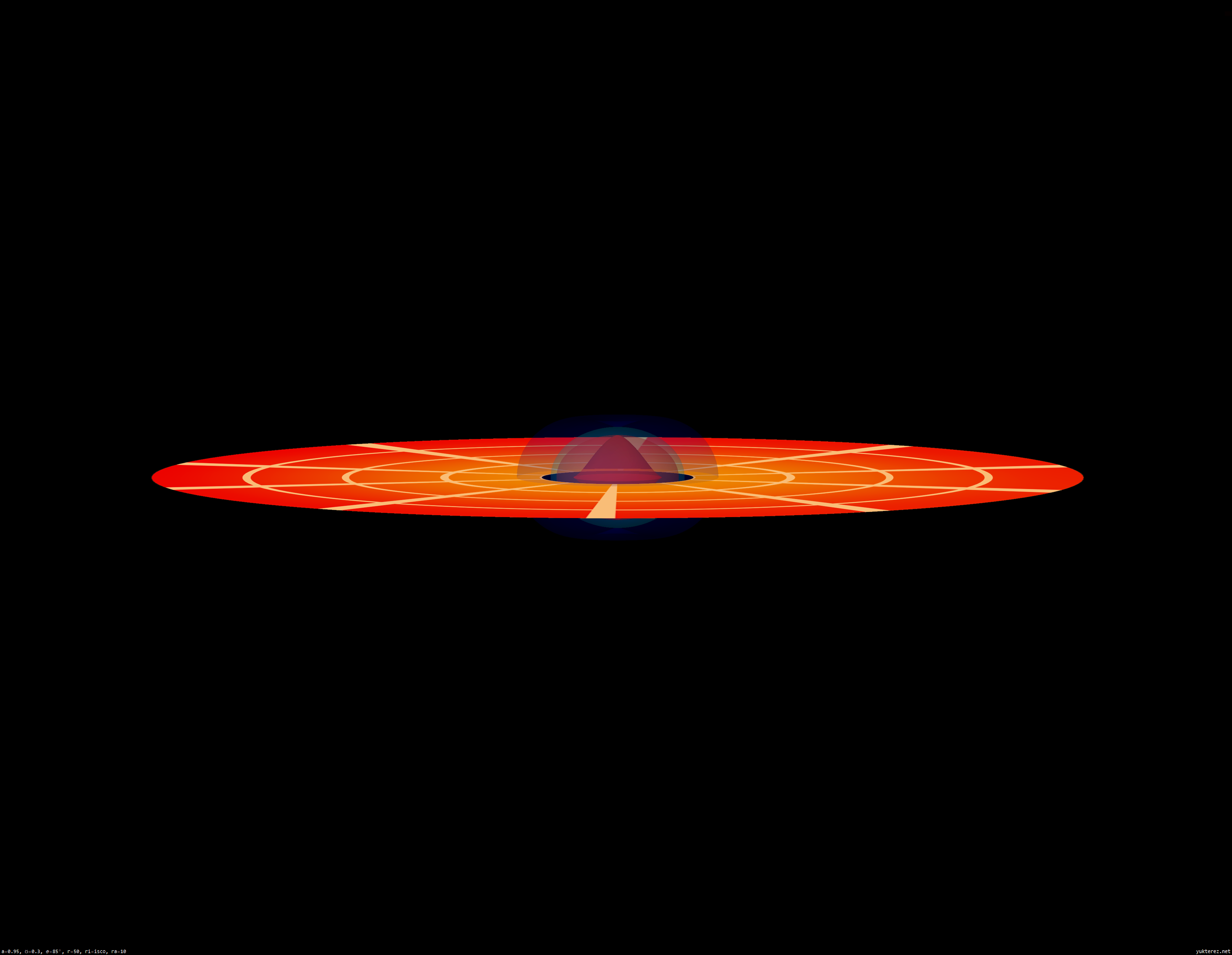
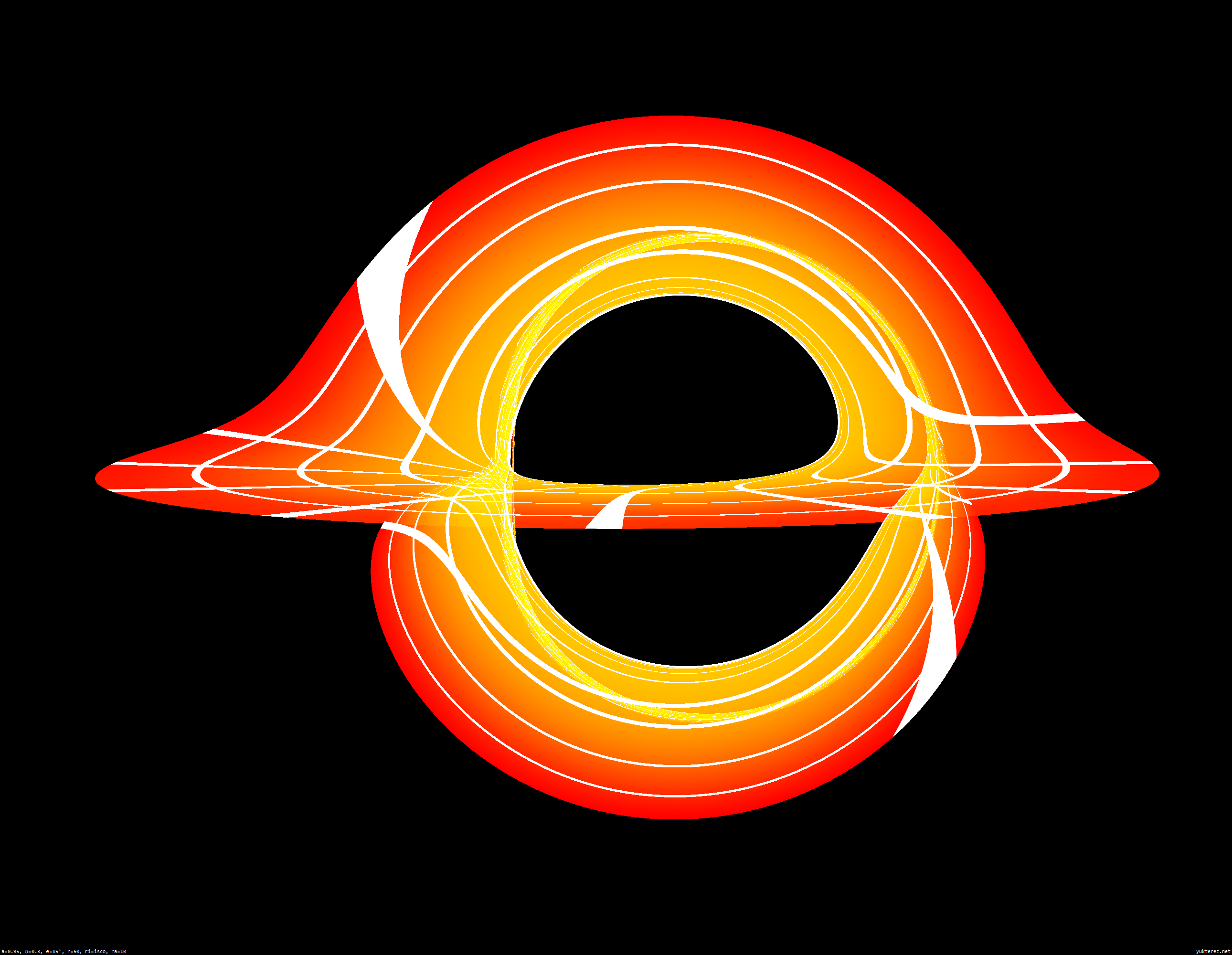
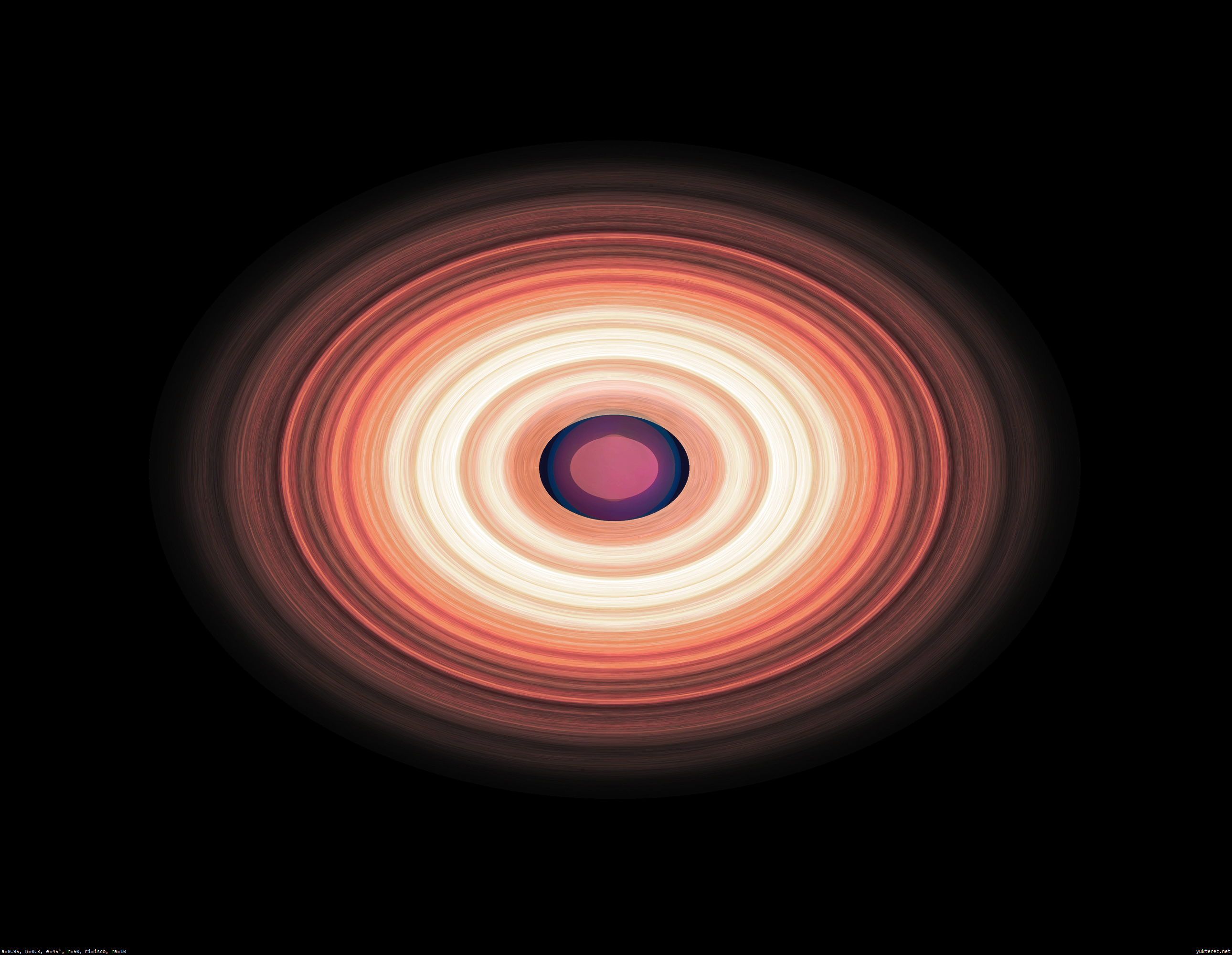
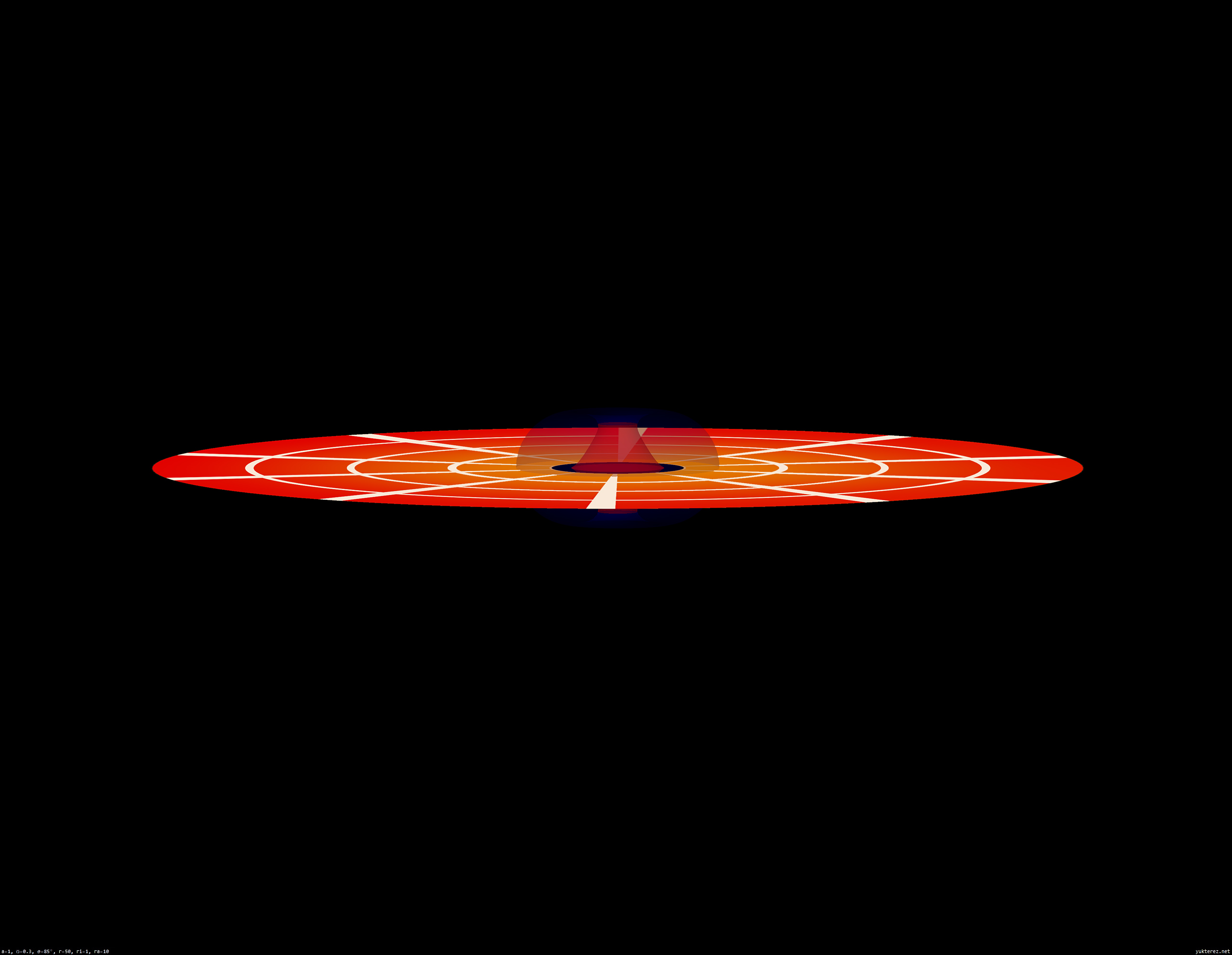
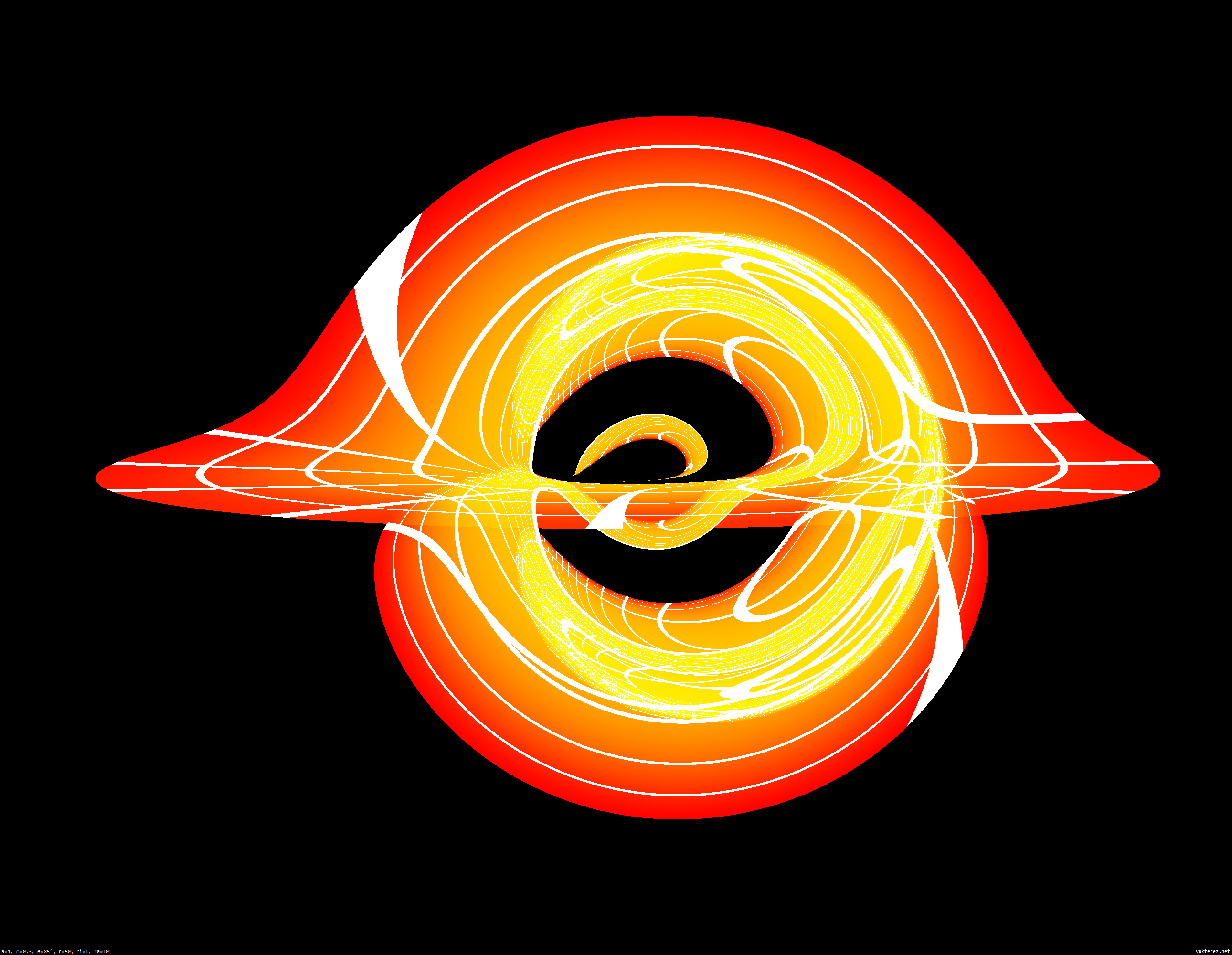
Für den Umrechner der Lokalgeschwindigkeit vom einen System ins andere klick hier. Beispiel mit a=℧=0.3, θ=85°, r=50, ri=isco=4.826, ra=10:
Minkowski Raytracer:
Output (in diesem Beispiel mit unbewegter Scheibe und ruhendem Beobachter, r=100, θ=70°, rk=3, ri=3, ra=7):

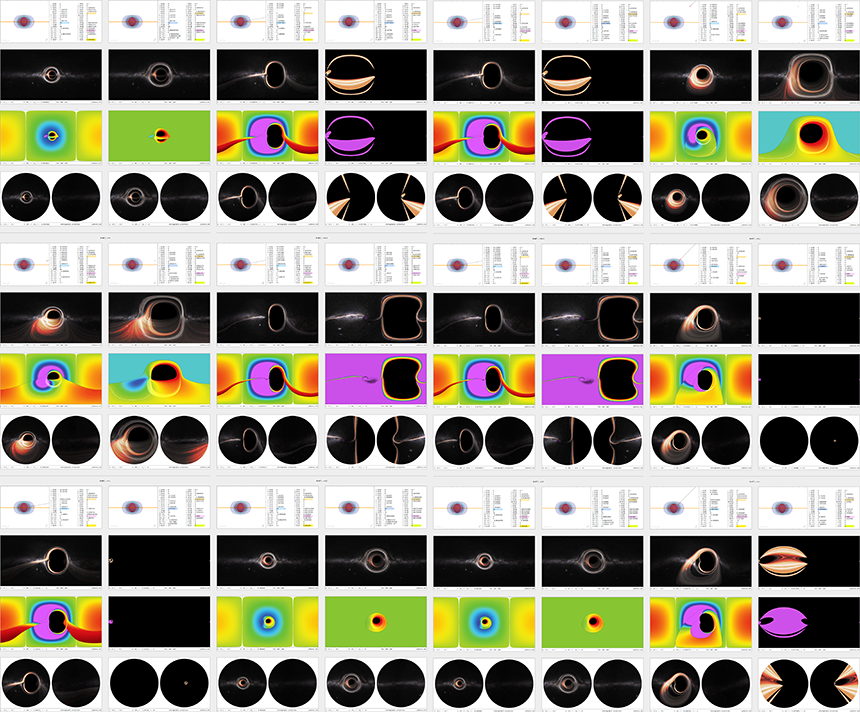
Aberration mit vr=vθ=0, vφ=0.95 (ArcSin[vφ]=71.8°) auf θ=70°; rk=3, ri=4, ra=7; 1. Zeile: r=40, r=30, 2. Zeile: r=20, r=10:
Vergleich der Perspektive eines Freifallers mit der eines ZAMO außerhalb und innerhalb eines SL mit Akkretionsscheibe:
Code: Alles auswählen
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* > raytracing.yukterez.net | 07.04.2018 - 29.04.2023 | Version 21 | Simon Tyran, Vienna *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
Pause[1] (* Boyer Lindquist Koordinaten *)
wp = MachinePrecision;
mt0 = Automatic;
mt1 = {"StiffnessSwitching", Method-> {"ExplicitRungeKutta", Automatic}};
mta = mt0; (* mt0 für Geschwindigkeit, mt1 für Genauigkeit *)
kernels = 6; (* Parallelisierung *)
grain = 5; (* Subparallelisierung auf kernels*grain Streifen *)
rsp = "Nearest"; (* Resampling *)
breite = 240; (* Zielabmessungen in Pixeln *)
hoehe = 120; (* Höhe sollte ein ganzzahliges Vielfaches von kernels*grain sein *)
zoom = 1; (* doppelter Zoom ergibt halben Sichtwinkel *)
LaunchKernels[kernels]
wp = MachinePrecision; (* Genauigkeit *)
st = 0.01; (* Auflösung des Gradienten *)
pic1 = Import["http://www.yukterez.net/mw/1/flip70.png"]; (* Hintergrundpanorama laden *)
pic2 = Import["http://www.yukterez.net/mw/1/worldmap.png"]; (* Sphärenoberfläche laden *)
pic3 = Import["http://www.yukterez.net/mw/akkretionsscheibe.jpg"];(* Scheibentextur laden *)
pic4 = Import["http://www.yukterez.net/mw/disk.png"]; (* Scheibengeometrie laden *)
pic5 = Import["http://www.yukterez.net/mw/gradient1.png"]; (* Helligkeitsgradient laden *)
pic6 = Import["http://www.yukterez.net/mw/gradient2.png"]; (* Farbgradient laden *)
pic7 = Import["http://www.yukterez.net/mw/1/cl.png"]; (* Checkerboard laden *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 1) Startbedingungen und Position des Beobachters ||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
r0 = 10; (* Radialkoordinate des Beobachters *)
R0 = 500; (* Radius des umspannenden Kugelschalenpanoramas *)
R1 = Max[1, Re[1.0001 rA]]; (* Sphäre *)
rT = 10; (* Lichtlaufzeit Synchronisation *)
t0 = 0; (* Eigenzeit des Beobachters *)
si = isco+0.1; (* Akkretionsscheibe Innenradius *)
sr = 7; (* Akkretionsscheibe Außenradius *)
θj = 10 π/180; (* Jet Winkeldurchmesser *)
θ0 = 70 π/180; (* Breitengrad *)
φ0 = 0; (* Längengrad *)
tmax = -100 R0; (* zeitlicher Integrationsbereich *)
a = 0.7; (* Spinparameter *)
℧ = 0.7; (* spezifische Ladung des schwarzen Lochs *)
v0 = 1; (* Geschwindigkeit der Photonen *)
q = 0; (* Ladung der Photonen *)
vr = -vя; (* Radiale Geschwindigkeit des Beobachters *)
vϑ = 0; (* Polare Geschwindigkeit des Beobachters *)
vφ = 0; (* Azimutale Geschwindigkeit des Beobachters: 0 für ZAMO, -й0 für stationär *)
vL = Sqrt[vr^2+vϑ^2+vφ^2];
hvs = 0; (* ArcSin[vφ/vL] *) (* horizontaler Versatz in Radianten *)
vvs = 0; (* ArcSin[vϑ/vL] *) (* vertikaler Versatz in Radianten *)
fmax = 2; fmin = 0; (* Doppler Frequenzbereich *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 2) Bildreflektion |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
fpt[{x_, y_}] := {If[y<0, x+1, x], If[y<0, -y, y]}
pcr1 = ParallelTable[
ImageTransformation[pic1, fpt, DataRange->{{-1, 1}, {0, 1}},
PlotRange->{{-1, 1}, {-1+(x-1)/kernels, -1+x/kernels}}, Resampling->rsp, Padding->"Periodic"],
{x, 1, 2 kernels}];
pct1 = ImageAssemble[Table[{pcr1[[x]]}, {x, 2 kernels, 1, -1}]];
pcr2 = ParallelTable[
ImageTransformation[pic2, fpt, DataRange->{{-1, 1}, {0, 1}},
PlotRange->{{-1, 1}, {-1+(x-1)/kernels, -1+x/kernels}}, Resampling->rsp, Padding->"Periodic"],
{x, 1, 2 kernels}];
pct2 = ImageAssemble[Table[{pcr2[[x]]}, {x, 2 kernels, 1, -1}]];
pcr3 = ParallelTable[
ImageTransformation[pic7, fpt, DataRange->{{-1, 1}, {0, 1}},
PlotRange->{{-1, 1}, {-1+(x-1)/kernels, -1+x/kernels}}, Resampling->rsp, Padding->"Periodic"],
{x, 1, 2 kernels}];
pct3 = ImageAssemble[Table[{pcr3[[x]]}, {x, 2 kernels, 1, -1}]];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 3) Funktionen |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
gtt = (2r0-℧^2)/Σ-1;
grr = Σ/Δ;
gθθ = Σ;
gφφ = Χ/Σ Sin[θ0]^2;
gtφ =-a (2r0-℧^2) Sin[θ0]^2/Σ;
rA = 1+Sqrt[1-a^2-℧^2];
rE = 1+Sqrt[1-℧^2];
Σ = r0^2+a^2 Cos[θ0]^2;
Δ = r0^2-2 r0+a^2+℧^2;
Χ = (r0^2+a^2)^2-a^2 Sin[θ0]^2 Δ;
Σs[rs_] := rs^2;
Δs[rs_] := rs^2-2 rs+a^2+℧^2;
Χs[rs_] := (rs^2+a^2)^2-a^2 Δs[rs];
κs[rs_] := a;
Σj[rt_, θt_] := rt^2+a^2 Cos[θt]^2;
Δj[rt_, θt_] := rt^2-2 rt+a^2+℧^2;
Χj[rt_, θt_] := (rt^2+a^2)^2-a^2 Sin[θt]^2 Δj[rt, θt];
ωj[rt_, θt_] := (a(2 rt-℧^2))/Χj[rt, θt];
ωR1 = ωj[R1, π/2];
ς = Abs@Sqrt[Χ/Δ/Σ]; ςr[rs_] := Abs@Sqrt[Χs[rs]/Δs[rs]/Σs[rs]];
μ = If[Abs[N@v0]==1.0, 0, -1];
j[v_] := Sqrt[1-v^2];
Ы[rs_] := Sqrt[Χs[rs]/Σs[rs]];
ωs[rs_] := (a (2 rs - ℧^2))/Χs[rs];
ε[rs_, vt] := Sqrt[Δs[rs] Σs[rs]/Χs[rs]]/j[vt]+Lz[rs, vt] ωs[rs];
Lz[rs_, vt] := vt Ы[rs]/j[vt];
nq[x_] := If[NumericQ[x], If[Element[x, Reals], x, 0], 0];
rl[x_] := If[Abs[Im[x]]>Abs[Re[x]], 1, x]
dΘF = Quiet[If[vL==0, 0, ArcCos[-vϑ/Sqrt[vr^2+vϑ^2+vφ^2]]]];
dθF = Quiet[If[vL==0, 0, If[vr>0, -dΘF, +dΘF]]];
dΦF = Quiet[If[vL==0, 0, ArcTan[Abs[vφ]/vr]]];
dφF = Quiet[If[vL==0, 0, If[vr!=0, -1, 1] If[vφ<0, +1, -1] If[NumericQ[dΦF], dΦF, π/2]]];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 4) Geschwindigkeitskomponenten ||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
εj[rt_, δt_, δr_, δθ_, δφ_] := δt (1-(2 rt-℧^2)/rt^2)+(a δφ (2 rt-℧^2))/rt^2;
vrj[rt_, δt_, δr_, δθ_, δφ_] := δr/Sqrt[Δj[rt, θt]] Sqrt[Σj[rt, π/2]];
vθj[rt_, δt_, δr_, δθ_, δφ_] := δθ Sqrt[Σj[rt, π/2]];
vφj[rt_, δt_, δr_, δθ_, δφ_] := (-(((a^2 Cos[(π/2)]^2+rt^2) (a^2+℧^2-2 rt+
rt^2) Sin[(π/2)] (-δφ-
(a q ℧ rt)/((a^2 Cos[(π/2)]^2+rt^2) (a^2+℧^2-2 rt+rt^2))+
(εj[rt, δt, δr, δθ, δφ] Csc[(π/2)]^2 (a (-a^2-℧^2+2 rt-rt^2) Sin[(π/2)]^2+a (a^2+
rt^2) Sin[(π/2)]^2))/((a^2 Cos[(π/2)]^2+rt^2) (a^2+℧^2-2 rt+rt^2))+(a q ℧ rt (a^2+
℧^2-2 rt+rt^2-a^2 Sin[(π/2)]^2))/((a^2 Cos[(π/2)]^2+rt^2)^2 (a^2+℧^2-2 rt+
rt^2))))/((a^2+℧^2-2 rt+rt^2-a^2 Sin[(π/2)]^2) Sqrt[((a^2+rt^2)^2-
a^2 (a^2+℧^2-2 rt+rt^2) Sin[(π/2)]^2)/(a^2 Cos[(π/2)]^2+rt^2)])));
vtj[rt_, δt_, δr_, δθ_, δφ_] := Sqrt[vrj[rt, δt, δr, δθ, δφ]^2+
vθj[rt, δt, δr, δθ, δφ]^2+vφj[rt, δt, δr, δθ, δφ]^2];
vφt[rt_, δt_, δr_, δθ_, δφ_] := vφj[rt, δt, δr, δθ, δφ]/vtj[rt, δt, δr, δθ, δφ];
shf[rt_, δt_, δr_, δθ_, δφ_] := Abs[ς/ςr[rt] Sqrt[1-vs[rt]^2]/(1-vs[rt] vφt[rt, δt, δr, δθ, δφ])];
dφv[rt_, tt_] := tt φs[rt]/ts[rt];
vθ =-vϑ;
θs = π/2;
θi =-θ0+π;
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 5) Photonensphäre und ISCO ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
rp = ц/.Solve[4 a^2 (ц-℧^2)-(ц^2-3 ц+2 ℧^2)^2==0 && ц>=If[Element[rA, Reals], rA, 0], ц];
rP = 1.01 Min[rp]; Rp = 1.01 Max[rp];
isco = Quiet[Min[RI/.NSolve[0 == RI (6 RI-RI^2-9 ℧^2+3 a^2)+4 ℧^2 (℧^2-a^2)-8 a (RI-
℧^2)^(3/2) && RI>=If[Element[rA, Reals], rA, 0], RI]]];
{"r horizon" -> N@rA, "r ergosphere" -> N@rE, "r isco" -> N@isco,
"r photon pro" -> N@Min[rp], "r photon ret" -> N@Max[rp], "r disk" -> N@sr,
"r observer" -> N@r0, "θ observer" -> N@θ0 180/π}
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 6) Geschwindigkeit und Zeitdilatation auf der Scheibe |||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
red[rs_] := Quiet[Reduce[
dt == (Lz[rs, vt] (-a (a^2+rs^2)+Δs[rs] κs[rs])+ε[rs, vt] ((a^2+rs^2)^2-
Δs[rs] κs[rs]^2))/(Δs[rs] Σs[rs])
&&
0 == ((a^2+(-2+rs) rs+℧^2) (16 a dt dΦ rs (rs-℧^2)+8 dt^2 rs (-rs+℧^2)+
dΦ^2 rs (8 rs (-a^2+rs^3)+a^2 (4 a^2+4 ℧^2-4 (a-℧) (a+℧)))))/(8 rs^6)
&&
dΦ == (Lz[rs, vt] (-a^2+Δs[rs])+ε[rs, vt] (a (a^2+rs^2)-Δs[rs] κs[rs]))/(Δs[rs] Σs[rs])
&&
vt > 0,
{vt, dΦ, dt},
Reals]];
vs = Interpolation[ParallelTable[{rr, If[Quiet@NumericQ[red[rr][[1, 2]]],
red[rr][[1, 2]], 0]}, {rr, 0, sr, st}]];
φs = Interpolation[ParallelTable[{rr, If[Quiet@NumericQ[red[rr][[2, 2]]],
red[rr][[2, 2]], 0]}, {rr, 0, sr, st}]];
ts = Interpolation[ParallelTable[{rr, If[Quiet@NumericQ[red[rr][[3, 2]]],
red[rr][[3, 2]], 0]}, {rr, 0, sr, st}]];
"Akkretionsscheibe:"
plot[func_, label_] := Plot[func, {rr, si, sr},
GridLines -> {{nq[Min[rp]], nq[Max[rp]], nq[rA], nq[si], nq[isco], nq[rE], nq[sr]}, {}},
Frame -> True, ImagePadding -> {{40, 12}, {12, 12}}, ImageSize -> 340,
PlotLabel -> label, PlotRange->{{0, sr}, All}]
Grid[{{
plot[Sqrt[Χs[rr]/Δs[rr]/Σs[rr]], "Gravitational time dilation: y=dt/dт, x=r"],
plot[φs[rr]/ts[rr], "Shapirodelayed angular velocity: y=dφ/dt, x=r"]},{
plot[ts[rr], "Total time dilation: y=dt/dτ, x=r"],
plot[φs[rr], "Coordinate speed: y=dφ/dτ, x=r"]}, {
plot[(a (2 rr-℧^2))/((a^2+rr^2)^2-a^2 (a^2-2 rr+rr^2+℧^2)), "Frame Dragging: y=dφ/dт, x=r"],
plot[vs[rr], "Local velocity: y=v=dl/dτ, x=r"]}}]
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 7) Frame Dragging und Gammafaktor |||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
й0 = (a (2 r0-℧^2) Sin[θ0] Sqrt[((a^2+r0^2)^2-a^2 (a^2-2 r0+r0^2+℧^2) Sin[θ0]^2)/((a^2-
2 r0+r0^2+℧^2) (r0^2+a^2 Cos[θ0]^2))])/((r0^2+a^2 Cos[θ0]^2) Sqrt[((a^2+r0^2)^2-a^2 (a^2-
2 r0+r0^2+℧^2) Sin[θ0]^2)/(r0^2+a^2 Cos[θ0]^2)]);
vя = Sqrt[((a^2+r0^2)(℧^2-2r0))/(a^2 Sin[θ0]^2(a^2+(r0-2)r0+℧^2)-(a^2+r0^2)^2)];
vR = Sqrt[(2 r0-℧^2)/(a^2+r0^2)];
U = {+vr, +vθ, +vφ};
γ = 1/Sqrt[1-Norm[U]^2];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 8) Rotationsmatrix für die auf der Sichtebene eintreffenden Strahlen ||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
Xyz[{x_, y_, z_}, α_] := {x Cos[α]-y Sin[α], x Sin[α]+y Cos[α], z};
xYz[{x_, y_, z_}, β_] := {x Cos[β]+z Sin[β], y, z Cos[β]-x Sin[β]};
xyZ[{x_, y_, z_}, ψ_] := {x, y Cos[ψ]-z Sin[ψ], y Sin[ψ]+z Cos[ψ]};
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 9) Raytracing Funktionscontainer ||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
raytracer[{Ф_, ϑ_}] :=
Quiet[Module[{DGL, sol, εj, pθi, pr0, Q, k, V, W, vw,
vr0i, vθ0i, vφ0i, vr0n, vθ0n, vφ0n, vr0a, vθia, vφ0a, vt0a,
t10, r10, Θ10, Φ10, t, r, θ, φ, τ,
т, т0, т1, т2, т3, т4, т5,
plunge, plunge0, plunge1, plunge2, plunge3,
plunge4, plunge5, plunge6, plunge7, plunge8,
dθ0, dφ0, δφ0, δθ0, δr0, δt0, tt0, rt0, θt0, φt0,
dθ1, dφ1, δφ1, δθ1, δr1, δt1, tt1, rt1, θt1, φt1,
dθ2, dφ2, δφ2, δθ2, δr2, δt2, tt2, rt2, θt2, φt2,
dθ3, dφ3, δφ3, δθ3, δr3, δt3, tt3, rt3, θt3, φt3,
dθ4, dφ4, δφ4, δθ4, δr4, δt4, tt4, rt4, θt4, φt4,
dθ5, dφ5, δφ5, δθ5, δr5, δt5, tt5, rt5, θt5, φt5,
dθ6, dφ6, δφ6, δθ6, δr6, δt6, tt6, rt6, θt6, φt6,
X, Y, Z, ξ, stepsize, laststep, mtl, ft, fτ, varb,
ft0s, ft1s, ft2s, ft3s, ft4s,
ft0v, ft1v, ft2v, ft3v, ft4v, ft5v,
ft0f, ft1f, ft2f, ft3f, ft4f,
ft5h, ft5b, ft5f, ft5x, ft5y, fjet,
dt0y, dr0y, dθ0y, dφ0y,
initcon, shF,
rt8, θt8, φt8, δt8, δr8, δθ8, δφ8},
vw=xyZ[Xyz[{0, 1, 0}, ϑ], Ф+π/2];
(* Übersetzung des Einfallswinkels in den lokalen Tetrad *)
vr0a = vw[[3]];
vφ0a = vw[[2]];
vθia = vw[[1]];
(* Betrag *)
vt0a = Sqrt[vr0a^2+vφ0a^2+vθia^2];
(* Normierung *)
vr0n = vr0a/vt0a;
vφ0n = vφ0a/vt0a;
vθ0n = vθia/vt0a;
(* Relativistische Geschwindigkeitsaddition *)
V={vr0n, vθ0n, vφ0n};
W=(U+V+γ/(1+γ)(U\[Cross](U\[Cross]V)))/(1+U.V);
(* Aberration *)
vr0i = W[[1]];
vθ0i = W[[2]];
vφ0i = W[[3]];
shF = Abs[If[vL==0, 1, Sqrt[1-vr^2-vϑ^2-vφ^2]/(1+vL (-Cos[If[vr>0, -dΘF, +dΘF]] Sin[ϑ]-
Sin[If[vr>0, -dΘF, +dΘF]] (Cos[-Ф-π/2+If[vr>0, -1, +1] ArcSin[vφ/vL]] Cos[ϑ] Cos[1/2 π]-
Cos[ϑ] Sin[-Ф-π/2+If[vr>0, -1, +1] ArcSin[vφ/vL]] Sin[1/2 π])))]];
initcon = TimeConstrained[NSolve[
dt0y == ς
&&
vr0i ==
Sqrt[(a^2 Cos[θi]^2+r0^2)/(a^2+℧^2-2 r0+r0^2)] Sqrt[1-μ^2 v0^2] dr0y
&&
vθ0i ==
Sqrt[a^2 Cos[θi]^2+r0^2] Sqrt[1-μ^2 v0^2] dθ0y
&&
vφ0i ==
(Sin[θi]^2 Sqrt[1-μ^2 v0^2] (a q μ^2 ℧ r0 v0^2+a (℧^2-
2 r0) dt0y+((a^2+r0^2)^2-a^2 (a^2+℧^2-
2 r0+r0^2) Sin[θi]^2) dφ0y))/((a^2 Cos[θi]^2+r0^2) Sqrt[(Sin[θi]^2 ((a^2+
r0^2)^2-a^2 (a^2+℧^2-2 r0+r0^2) Sin[θi]^2))/(a^2 Cos[θi]^2+r0^2)]),
{dt0y, dr0y, dθ0y, dφ0y}, Reals], 3];
DGL = If[NumericQ[dt0y /. initcon[[1]]] == False, {}, { (* Bewegungsgleichungen *)
t''[τ] == Re[-(1/((a^2 Cos[θ[τ]]^2+r[τ]^2)^2))((q ℧ (a^2 Cos[θ[τ]]^2-
r[τ]^2) (a^2+r[τ]^2) r'[τ])/(a^2+℧^2-2 r[τ]+r[τ]^2)-(2 (a^2 Cos[θ[τ]]^2+
℧^2 r[τ]-r[τ]^2) (a^2+r[τ]^2) r'[τ] t'[τ])/(a^2+℧^2-2 r[τ]+r[τ]^2)+
a^2 q ℧ r[τ] Sin[2 θ[τ]] θ'[τ]+a^2 (℧^2-2 r[τ]) Sin[2 θ[τ]] t'[τ] θ'[τ]+
(a (2 a^4 Cos[θ[τ]]^2+a^2 ℧^2 (3+Cos[2 θ[τ]]) r[τ]-a^2 (3+Cos[2 θ[τ]]) r[τ]^2+
4 ℧^2 r[τ]^3-6 r[τ]^4) Sin[θ[τ]]^2 r'[τ] φ'[τ])/(a^2+℧^2-2 r[τ]+r[τ]^2)-
2 a^3 Cos[θ[τ]] (℧^2-2 r[τ]) Sin[θ[τ]]^3 θ'[τ] φ'[τ])],
t'[0] == dt0y/.initcon[[1]],
t[0] == 0,
r''[τ] == Re[-(1/(2 (a^2 Cos[θ[τ]]^2+r[τ]^2)^4))((2 (-a^2 Cos[θ[τ]]^2 (-1+r[τ])+(a^2+
℧^2-r[τ]) r[τ]) (a^2 Cos[θ[τ]]^2+r[τ]^2)^3 r'[τ]^2)/(a^2+℧^2-2 r[τ]+r[τ]^2)+
q ℧ (a^2 Cos[θ[τ]]^2-r[τ]^2) (a^2+r[τ]^2) (a^2+2 ℧^2+a^2 Cos[2 θ[τ]]-4 r[τ]+
2 r[τ]^2) t'[τ]-2 a^2 q ℧ (℧^2-2 r[τ]) (a^2 Cos[θ[τ]]^2-r[τ]^2) Sin[θ[τ]]^2 t'[τ]-
2 (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-r[τ]^2) (a^2 Cos[θ[τ]]^2+r[τ]^2) (a^2+℧^2-2 r[τ]+
r[τ]^2) t'[τ]^2-4 a^2 Cos[θ[τ]] (a^2 Cos[θ[τ]]^2+r[τ]^2)^3 Sin[θ[τ]] r'[τ] θ'[τ]-
2 r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2)^3 (a^2+℧^2-2 r[τ]+r[τ]^2) θ'[τ]^2-2 a q ℧ (℧^2-
2 r[τ]) (a^2 Cos[θ[τ]]^2-r[τ]^2) (a^2+r[τ]^2) Sin[θ[τ]]^2 φ'[τ]+
2 a q ℧ (a^2 Cos[θ[τ]]^2-r[τ]^2) (-(a^2+r[τ]^2)^2 Sin[θ[τ]]^2+a^2 (a^2+
℧^2-2 r[τ]+r[τ]^2) Sin[θ[τ]]^4) φ'[τ]+4 a (a^2 Cos[θ[τ]]^2+(℧^2-
r[τ]) r[τ]) (a^2 Cos[θ[τ]]^2+r[τ]^2) (a^2+℧^2-2 r[τ]+r[τ]^2) Sin[θ[τ]]^2 t'[τ] φ'[τ]+
2 (a^2 Cos[θ[τ]]^2+r[τ]^2) (a^2+℧^2-2 r[τ]+r[τ]^2) Sin[θ[τ]]^2 (-r[τ] (-a^4+r[τ]^4+
a^2 (a^2+℧^2-r[τ]) Sin[θ[τ]]^2)+Cos[θ[τ]]^2 (-2 a^2 r[τ] (a^2+r[τ]^2)+a^4 (-1+
r[τ]) Sin[θ[τ]]^2)) φ'[τ]^2)],
r'[0] == dr0y/.initcon[[1]],
r[0] == r0,
θ''[τ] == Re[-(1/(2 (a^2 Cos[θ[τ]]^2+r[τ]^2)^3))((a^2 (a^2 Cos[θ[τ]]^2+
r[τ]^2)^2 Sin[2 θ[τ]] r'[τ]^2)/(a^2+℧^2-2 r[τ]+r[τ]^2)+4 r[τ] (a^2 Cos[θ[τ]]^2+
r[τ]^2)^2 r'[τ] θ'[τ]-1/8 Sin[2 θ[τ]] (8 r[τ]^6 φ'[τ]^2+16 a r[τ]^3 φ'[τ] (q ℧-
2 t'[τ]+2 a Sin[θ[τ]]^2 φ'[τ])+8 a^2 r[τ]^4 (θ'[τ]^2+(2+Cos[2 θ[τ]]) φ'[τ]^2)+
a^2 (-8 ℧^2 t'[τ]^2+8 a^4 Cos[θ[τ]]^4 θ'[τ]^2+16 a ℧^2 t'[τ] φ'[τ]+a^2 (3 a^2-
5 ℧^2+4 (a^2+℧^2) Cos[2 θ[τ]]+(a^2+℧^2) Cos[4 θ[τ]]) φ'[τ]^2)+
r[τ]^2 (16 a^4 Cos[θ[τ]]^2 θ'[τ]^2+a φ'[τ] (16 ℧^2 t'[τ]+a (11 a^2-
8 ℧^2+4 (3 a^2+2 ℧^2) Cos[2 θ[τ]]+a^2 Cos[4 θ[τ]]) φ'[τ]))+
8 a^2 r[τ] (2 t'[τ]^2-2 t'[τ] (q ℧+2 a φ'[τ])+a φ'[τ] (2 q ℧+
a (3+Cos[2 θ[τ]]) Sin[θ[τ]]^2 φ'[τ]))))],
θ'[0] == dθ0y/.initcon[[1]],
θ[0] == θi,
φ''[τ] == Re[-(1/(4 (a^2 Cos[θ[τ]]^2+r[τ]^2)^2))((4 a q ℧ (a^2 Cos[θ[τ]]^2-
r[τ]^2) r'[τ])/(a^2+℧^2-2 r[τ]+r[τ]^2)-(8 a (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-
r[τ]^2) r'[τ] t'[τ])/(a^2+℧^2-2 r[τ]+r[τ]^2)+8 a q ℧ Cot[θ[τ]] r[τ] θ'[τ]+
8 a Cot[θ[τ]] (℧^2-2 r[τ]) t'[τ] θ'[τ]+(1/(a^2+℧^2-2 r[τ]+r[τ]^2))(a^2 (3 a^2+
8 ℧^2+4 a^2 Cos[2 θ[τ]]+a^2 Cos[4 θ[τ]]) r[τ]-4 a^2 (3+Cos[2 θ[τ]]) r[τ]^2+
8 (a^2+℧^2+a^2 Cos[2 θ[τ]]) r[τ]^3-16 r[τ]^4+8 r[τ]^5+
2 a^4 Sin[2 θ[τ]]^2) r'[τ] φ'[τ]+Cot[θ[τ]] (a^2 (3 a^2-4 ℧^2+4 (a^2+
℧^2) Cos[2 θ[τ]]+a^2 Cos[4 θ[τ]])+16 a^2 Cos[θ[τ]]^2 r[τ]^2+8 r[τ]^4+
16 a^2 r[τ] Sin[θ[τ]]^2) θ'[τ] φ'[τ])],
φ'[0] == dφ0y/.initcon[[1]],
φ[0] == φ0,
WhenEvent[Abs[r[τ]] == N[R0]||Abs[r[τ]]>R0 &&
NumericQ[plunge6] == False,
(plunge6=τ) &&
(tt6=t[τ]) && (rt6=r[τ]) && (θt6=θ[τ]) && (φt6=φ[τ]);
"StopIntegration"],
WhenEvent[Abs[r[τ]] == N[R1] &&
NumericQ[plunge5] == False,
(plunge5=τ) && (tt5=t[τ]) && (rt5=r[τ]) && (θt5=θ[τ]) && (φt5=φ[τ]);
If[r0>R1, "StopIntegration"]],
WhenEvent[Mod[180/π Re[θ[τ]], 180] == 90.0 && r[τ]>N[si] &&
r[τ]<N[sr] && τ < -0.05 &&
NumericQ[plunge0] == False,
(plunge0=τ) &&
(tt0=t[τ]) && (rt0=r[τ]) && (θt0=θ[τ]) && (φt0=φ[τ]) &&
(δt0=t'[τ]) && (δr0=r'[τ]) && (δθ0=θ'[τ]) && (δφ0=φ'[τ])],
WhenEvent[Mod[180/π Re[θ[τ]], 180] == 90.0 && r[τ]>N[si] &&
r[τ]<N[sr] && Re[θ'[τ]]>0 && τ < -0.05 &&
NumericQ[plunge1] == False,
(plunge1=τ) &&
(tt1=t[τ]) && (rt1=r[τ]) && (θt1=θ[τ]) && (φt1=φ[τ]) &&
(δt1=t'[τ]) && (δr1=r'[τ]) && (δθ1=θ'[τ]) && (δφ1=φ'[τ])],
WhenEvent[Mod[180/π Re[θ[τ]], 180] == 90.0 &&
r[τ]>N[si] && r[τ]<N[sr] && Re[θ'[τ]]<0 && τ < -0.05 &&
NumericQ[plunge2] == False,
(plunge2=τ) &&
(tt2=t[τ]) && (rt2=r[τ]) && (θt2=θ[τ]) && (φt2=φ[τ]) &&
(δt2=t'[τ]) && (δr2=r'[τ]) && (δθ2=θ'[τ]) && (δφ2=φ'[τ])],
WhenEvent[Mod[180/π Re[θ[τ]], 180] == 90.0 && r[τ]>N[si] &&
r[τ]<N[sr] && Re[θ'[τ]]>0 &&
τ < plunge1-0.05 &&
NumericQ[plunge3] == False && NumericQ[plunge1] == True,
(plunge3=τ) &&
(tt3=t[τ]) && (rt3=r[τ]) && (θt3=θ[τ]) && (φt3=φ[τ]) &&
(δt3=t'[τ]) && (δr3=r'[τ]) && (δθ3=θ'[τ]) && (δφ3=φ'[τ])],
WhenEvent[Mod[180/π Re[θ[τ]], 180] == 90.0 && r[τ]>N[si] &&
r[τ]<N[sr] && Re[θ'[τ]]<0 &&
τ < plunge2-0.05 &&
NumericQ[plunge4] == False && NumericQ[plunge2] == True,
(plunge4=τ) &&
(tt4=t[τ]) && (rt4=r[τ]) && (θt4=θ[τ]) && (φt4=φ[τ]) &&
(δt4=t'[τ]) && (δr4=r'[τ]) && (δθ4=θ'[τ]) && (δφ4=φ'[τ])],
WhenEvent[Mod[Re[θ[τ]], π] < θj/2 || Mod[Re[θ[τ]], π] > π-θj/2 &&
τ < -0.05 && NumericQ[plunge8] == False,
(plunge8=τ) &&
(tt8=t[τ]) && (rt8=r[τ]) && (θt8=θ[τ]) && (φt8=φ[τ]) &&
(δt8=t'[τ]) && (δr8=r'[τ]) && (δθ8=θ'[τ]) && (δφ8=φ'[τ])]
}];
(* Integrator *)
sol = TimeConstrained[If[NumericQ[dt0y /. initcon[[1]]] == False, {},
NDSolve[DGL, {t, r, θ, φ}, {τ, 0, tmax},
WorkingPrecision-> wp,
Method-> mta,
MaxSteps-> Infinity,
StepMonitor :> (laststep=plunge7; plunge7=τ;
stepsize=plunge7-laststep;), Method->{"EventLocator",
"Event" :> (If[stepsize<1*^-4, 0, 1])}
]], 10];
ft5h=If[NumericQ[plunge5], {φt5-π, θt5+π/2}, {0, -π/2}];
ft5b=If[NumericQ[plunge6], If[rt6<If[Element[rA, Reals], rA, 0], {0, -π/2},
If[rt6>4 R0, {0, -π/2}, {φt6-π, θt6+π/2}]], {0, -π/2}];
ft5f={0, Min[fmax, ς shF]};
ft5x=If[NumericQ[plunge6], {0, 1}, {0, 0}];
ft5y=If[NumericQ[plunge5], {0, 1}, {0, 0}];
ft0s=If[NumericQ[plunge0], {φt0, rt0}, {π, sr}];
ft1s=If[NumericQ[plunge1], {φt1, rt1}, {π, sr}];
ft2s=If[NumericQ[plunge2], {φt2, rt2}, {π, sr}];
ft3s=If[NumericQ[plunge3], {φt3, rt3}, {π, sr}];
ft4s=If[NumericQ[plunge4], {φt4, rt4}, {π, sr}];
ft0v=If[NumericQ[plunge0], {-dφv[rt0, tt0+t0+rT], 0}, {0, 0}];
ft1v=If[NumericQ[plunge1], {-dφv[rt1, tt1+t0+rT], 0}, {0, 0}];
ft2v=If[NumericQ[plunge2], {-dφv[rt2, tt2+t0+rT], 0}, {0, 0}];
ft3v=If[NumericQ[plunge3], {-dφv[rt3, tt3+t0+rT], 0}, {0, 0}];
ft4v=If[NumericQ[plunge4], {-dφv[rt4, tt4+t0+rT], 0}, {0, 0}];
ft5v=If[NumericQ[plunge5], {-(tt5+t0+rT) ωR1, 0}, {0, 0}];
ft0f=If[NumericQ[plunge0], {0, Min[fmax, shF shf[rt0, δt0, δr0, δθ0, δφ0]]}, {0, 0}];
ft1f=If[NumericQ[plunge1], {0, Min[fmax, shF shf[rt1, δt1, δr1, δθ1, δφ1]]}, {0, 0}];
ft2f=If[NumericQ[plunge2], {0, Min[fmax, shF shf[rt2, δt2, δr2, δθ2, δφ2]]}, {0, 0}];
ft3f=If[NumericQ[plunge3], {0, Min[fmax, shF shf[rt3, δt3, δr3, δθ3, δφ3]]}, {0, 0}];
ft4f=If[NumericQ[plunge4], {0, Min[fmax, shF shf[rt4, δt4, δr4, δθ4, δφ4]]}, {0, 0}];
fjet=If[NumericQ[plunge8], {0, 1}, {0, 0}];
{
ft0s, ft1s, ft2s, ft3s, ft4s,
ft0s+ft0v, ft1s+ft1v, ft2s+ft2v, ft3s+ft3v, ft4s+ft4v,
ft0f, ft1f, ft2f, ft3f, ft4f,
ft5h+ft5v, ft5b, ft5f, ft5x, ft5y,
fjet, Fjet
}]];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 10) Memoryfunktion ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
mem : raytrace[{Ф_, ϑ_}] := mem = Quiet[Re[raytracer[{Ф, ϑ}]]];
ray01[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[01]];
ray02[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[02]];
ray03[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[03]];
ray04[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[04]];
ray05[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[05]];
ray06[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[06]];
ray07[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[07]];
ray08[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[08]];
ray09[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[09]];
ray10[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[10]];
ray11[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[11]];
ray12[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[12]];
ray13[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[13]];
ray14[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[14]];
ray15[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[15]];
ray16[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[16]];
ray17[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[17]];
ray18[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[18]];
ray19[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[19]];
ray20[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[20]];
ray21[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[21]];
ray22[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[22]];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 11) Proportionen ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
width1 = ImageDimensions[pic1][[1]]; height1 = ImageDimensions[pic1][[2]];
width2 = ImageDimensions[pic2][[1]]; height2 = ImageDimensions[pic2][[2]];
width3 = ImageDimensions[pic3][[1]]; height3 = ImageDimensions[pic3][[2]];
width4 = ImageDimensions[pic4][[1]]; height4 = ImageDimensions[pic4][[2]];
width5 = ImageDimensions[pic5][[1]]; height5 = ImageDimensions[pic5][[2]];
width6 = ImageDimensions[pic7][[1]]; height6 = ImageDimensions[pic7][[2]];
hzoom = If[breite>2 hoehe, 1/zoom, 1/zoom/2/hoehe*breite];
vzoom = If[breite>2 hoehe, 1/zoom*2 hoehe/breite, 1/zoom];
"Geschätzte Rechenzeit" -> 1.2 (AbsoluteTiming[Do[raytracer[{
RandomReal[{-π, π}]/zoom, RandomReal[{-π/2, π/2}]/zoom
}], {ü, 1, 50}]][[1]])/50*hoehe*breite/kernels/60 "Minuten"
FOV->{360.0 hzoom "degree", 180.0 vzoom "degree"}
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 12) Output ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
img = ParallelTable[{
(* 1 Hintergrundpanorama *)
Quiet@ImageTransformation[pct1, ray17, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-π, π-2π/width1},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+vvs/vzoom+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 2 Sphäre *)
Quiet@ImageTransformation[pct2, ray16, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-3π/2, π/2-2π/width2},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+π/kernels/grain+vvs/vzoom} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 3 Scheibe Textur komplett *)
Quiet@ImageTransformation[pic3, ray01, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 4 Scheibe Textur Front *)
Quiet@ImageTransformation[pic3, ray02, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 5 Scheibe Textur Echo 1 *)
Quiet@ImageTransformation[pic3, ray03, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 6 Scheibe Textur Echo 2 *)
Quiet@ImageTransformation[pic3, ray04, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 7 Scheibe Textur Echo 3 *)
Quiet@ImageTransformation[pic3, ray05, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 8 Scheibe Geometrie still komplett *)
Quiet@ImageTransformation[pic4, ray01, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 9 Scheibe Geometrie still Front *)
Quiet@ImageTransformation[pic4, ray02, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 10 Scheibe Geometrie still Echo 1 *)
Quiet@ImageTransformation[pic4, ray03, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 11 Scheibe Geometrie still Echo 2 *)
Quiet@ImageTransformation[pic4, ray04, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 12 Scheibe Geometrie still Echo 3 *)
Quiet@ImageTransformation[pic4, ray05, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 13 Scheibe Geometrie rotierend komplett *)
Quiet@ImageTransformation[pic4, ray06, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 14 Scheibe Geometrie rotierend Front *)
Quiet@ImageTransformation[pic4, ray07, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 15 Scheibe Geometrie rotierend Echo 1 *)
Quiet@ImageTransformation[pic4, ray08, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 16 Scheibe Geometrie rotierend Echo 2 *)
Quiet@ImageTransformation[pic4, ray09, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 17 Scheibe Geometrie rotierend Echo 3 *)
Quiet@ImageTransformation[pic4, ray10, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 18 Frequenzverschiebung komplett SW *)
Quiet@ImageTransformation[pic5, ray11, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-1, 1},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 19 Frequenzverschiebung Front SW *)
Quiet@ImageTransformation[pic5, ray12, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 20 Frequenzverschiebung Echo 1 SW *)
Quiet@ImageTransformation[pic5, ray13, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 21 Frequenzverschiebung Echo 2 SW *)
Quiet@ImageTransformation[pic5, ray14, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 22 Frequenzverschiebung Echo 3 SW *)
Quiet@ImageTransformation[pic5, ray15, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 23 Frequenzverschiebung komplett Farbe *)
Quiet@ImageTransformation[pic6, ray11, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 24 Frequenzverschiebung Front Farbe *)
Quiet@ImageTransformation[pic6, ray12, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 25 Frequenzverschiebung Echo 1 Farbe *)
Quiet@ImageTransformation[pic6, ray13, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 26 Frequenzverschiebung Echo 2 Farbe *)
Quiet@ImageTransformation[pic6, ray14, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 27 Frequenzverschiebung Echo 3 Farbe *)
Quiet@ImageTransformation[pic6, ray15, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 28 Hintergrundpanorama *)
ImageTransformation[pct3, ray17, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-π, π-2π/width6},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+vvs/vzoom+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 29 Sphäre *)
ImageTransformation[pct3, ray16, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-π, π-2π/width6},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+π/kernels/grain+vvs/vzoom} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 30 Scheibe Textur komplett *)
ImageTransformation[pic7, ray01, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width6},
{si, sr+(sr-si)/height6}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 31 Frequenzverschiebung Hintergrund Farbe *)
Quiet@ImageTransformation[pic6, ray18, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 32 Frequenzverschiebung Hintergrund SW *)
Quiet@ImageTransformation[pic5, ray18, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 33 Kontur BH *)
Quiet@ImageTransformation[pic5, ray19, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{0, 1}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 34 Kontur IH *)
Quiet@ImageTransformation[pic5, ray20, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{0, 1}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 35 Jet 1 *)
Quiet@ImageTransformation[pic5, ray21, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{0, 1}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 36 Jet 2 *)
Quiet@ImageTransformation[pic5, ray21, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{0, 1}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"]
}, {x, 0, π-π/kernels/grain, π/kernels/grain}];
image[num_] := ImageAssemble[Table[{img[[x, num]]}, {x, kernels grain, 1, -1}]];
fi[x_] := ColorNegate[x];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 13) Composite |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
ParallelTable[image[n], {n, 1, 35, 1}]
ds1 = image[8]
ds2 = ImageMultiply[fi@image[09], fi@image[10]];
ds3 = ImageMultiply[fi@image[11], fi@image[12]];
ds4 = fi@ImageMultiply[ds2, ds3]
ds5 = image[13]
ds6 = ImageMultiply[fi@image[14], fi@image[15]];
ds7 = ImageMultiply[fi@image[16], fi@image[17]];
ds8 = fi@ImageMultiply[ds6, ds7]
bf1 = image[31]
bf2 = image[32]
bf3 = image[33]
bf4 = image[34]
bl1 = image[23]
bl2 = ImageMultiply[fi@image[24], fi@image[25]];
bl3 = ImageMultiply[fi@image[26], fi@image[27]];
bl4 = fi@ImageMultiply[bl2, bl3]
gr1 = image[18]
gr2 = ImageMultiply[fi@image[19], fi@image[20]];
gr3 = ImageMultiply[fi@image[21], fi@image[22]];
gr4 = fi@ImageMultiply[gr2, gr3]
sea = ImageMultiply[image[04], image[19]];
seb = ImageMultiply[image[05], image[20]];
sec = ImageMultiply[image[06], image[21]];
sed = ImageMultiply[image[07], image[22]];
se1 = image[03]
se2 = ImageMultiply[fi@image[04], fi@image[05]];
se3 = ImageMultiply[fi@image[06], fi@image[07]];
se4 = fi@ImageMultiply[se2, se3]
se5 = ImageMultiply[fi@sea, fi@seb];
se6 = ImageMultiply[fi@sec, fi@sed];
se7 = fi@ImageMultiply[se5, se6]
se8 = fi@ImageMultiply[fi@se7, fi@se7]
se9 = fi@ImageMultiply[fi@se8, fi@se7]
bkg = image[1]
hrz = image[2]
cb1 = image[28]
cb2 = image[29]
cb3 = image[30]
jet = image[35]
Quit[]
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 14) Alternative initcon dt/dτ falls Partikel statt Photonen verwendet werden ||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* initcon = NSolve[
-μ == -(((r0^2+a^2 Cos[θ0]^2) dr0y^2)/(a^2-2 r0+r0^2+℧^2))+((a^2-2 r0+
r0^2+℧^2-a^2 Sin[θ0]^2) (dt0y)^2)/(r0^2+a^2 Cos[θ0]^2)+(-r0^2-
a^2 Cos[θ0]^2) dθ0y^2+(2 a (2 r0-℧^2) Sin[θ0]^2 dt0y dφ0y)/(r0^2+
a^2 Cos[θ0]^2)+((-(a^2+r0^2)^2 Sin[θ0]^2+a^2 (a^2-2 r0+r0^2+
℧^2) Sin[θ0]^4) dφ0y^2)/(r0^2+a^2 Cos[θ0]^2)
&&
dt0y > 0
&&
vr0i ==
Sqrt[(a^2 Cos[θi]^2+r0^2)/(a^2+℧^2-2 r0+r0^2)] Sqrt[1-μ^2 v0^2] dr0y
&&
vθ0i ==
Sqrt[a^2 Cos[θi]^2+r0^2] Sqrt[1-μ^2 v0^2] dθ0y
&&
vφ0i ==
(Sin[θi]^2 Sqrt[1-μ^2 v0^2] (a q μ^2 ℧ r0 v0^2+a (℧^2-
2 r0) dt0y+((a^2+r0^2)^2-a^2 (a^2+℧^2-
2 r0+r0^2) Sin[θi]^2) dφ0y))/((a^2 Cos[θi]^2+r0^2) Sqrt[(Sin[θi]^2 ((a^2+
r0^2)^2-a^2 (a^2+℧^2-2 r0+r0^2) Sin[θi]^2))/(a^2 Cos[θi]^2+r0^2)]),
{dt0y, dr0y, dθ0y, dφ0y}, Reals]; *)
Wenn der Beobachter nahe oder hinter dem Horizont ist empfehlen sich Raindrop Doran Koordinaten (Beispiel: klick, Animation: .nb-File):
Code: Alles auswählen
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* > raytracing.yukterez.net | 07.04.2018 - 09.09.2020 | Version 20 | Simon Tyran, Vienna *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
Pause[1] (* Raindrop Doran Koordinaten *)
wp = MachinePrecision;
mt0 = Automatic;
mt1 = {"StiffnessSwitching", Method-> {"ExplicitRungeKutta", Automatic}};
mta = mt0; (* mt0 für Geschwindigkeit, mt1 für Genauigkeit *)
kernels = 6; (* Parallelisierung *)
grain = 5; (* Subparallelisierung auf kernels*grain Streifen *)
rsp = "Nearest"; (* Resampling *)
breite = 240; (* Zielabmessungen in Pixeln *)
hoehe = 120; (* Höhe sollte ein ganzzahliges Vielfaches von kernels*grain sein *)
zoom = 1; (* doppelter Zoom ergibt halben Sichtwinkel *)
LaunchKernels[kernels]
wp = MachinePrecision; (* Genauigkeit *)
st = 0.01; (* Auflösung des Gradienten *)
pic1 = Import["http://www.yukterez.net/mw/1/flip70.png"]; (* Hintergrundpanorama laden *)
pic2 = Import["http://www.yukterez.net/mw/1/worldmap.png"]; (* Sphärenoberfläche laden *)
pic3 = Import["http://www.yukterez.net/mw/akkretionsscheibe.jpg"];(* Scheibentextur laden *)
pic4 = Import["http://www.yukterez.net/mw/disk.png"]; (* Scheibengeometrie laden *)
pic5 = Import["http://www.yukterez.net/mw/gradient1.png"]; (* Helligkeitsgradient laden *)
pic6 = Import["http://www.yukterez.net/mw/gradient2.png"]; (* Farbgradient laden *)
pic7 = Import["http://www.yukterez.net/mw/1/cl.png"]; (* Checkerboard laden *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 1) Startbedingungen und Position des Beobachters ||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
r0 = 10; (* Radialkoordinate des Beobachters *)
R0 = 500; (* Radius des umspannenden Kugelschalenpanoramas *)
R1 = Max[1, Re[1.0001 rA]]; (* Sphäre *)
rT = 10; (* Lichtlaufzeit Synchronisation *)
t0 = 0; (* Eigenzeit des Beobachters *)
si = isco+0.1; (* Akkretionsscheibe Innenradius *)
sr = 7; (* Akkretionsscheibe Außenradius *)
θ0 = 70 π/180; (* Breitengrad *)
φ0 = 0; (* Längengrad *)
tmax = -100 R0; (* zeitlicher Integrationsbereich *)
a = 0.7; (* Spinparameter *)
℧ = 0.7; (* spezifische Ladung des schwarzen Lochs *)
v0 = 1; (* Geschwindigkeit der Photonen *)
vr = 0; (* Radiale Geschwindigkeit relativ zum Raindrop *)
vϑ = 0; (* Polare Geschwindigkeit des Beobachters *)
vφ = 0; (* Azimutale Geschwindigkeit des Beobachters: 0 für ZAMO, -й0 für stationär *)
vL = Sqrt[vr^2+vϑ^2+vφ^2];
hvs = 0; (* ArcSin[vφ/vL] *) (* horizontaler Versatz in Radianten *)
vvs = 0; (* ArcSin[vϑ/vL] *) (* vertikaler Versatz in Radianten *)
fmax = 2; fmin = 0; (* Doppler Frequenzbereich *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 2) Bildreflektion |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
fpt[{x_, y_}] := {If[y<0, x+1, x], If[y<0, -y, y]}
pcr1 = ParallelTable[
Quiet@ImageTransformation[pic1, fpt, DataRange->{{-1, 1}, {0, 1}},
PlotRange->{{-1, 1}, {-1+(x-1)/kernels, -1+x/kernels}},
Resampling->rsp, Padding->"Periodic"],
{x, 1, 2 kernels}];
pct1 = ImageAssemble[Table[{pcr1[[x]]}, {x, 2 kernels, 1, -1}]];
pcr2 = ParallelTable[
Quiet@ImageTransformation[pic2, fpt, DataRange->{{-1, 1}, {0, 1}},
PlotRange->{{-1, 1}, {-1+(x-1)/kernels, -1+x/kernels}},
Resampling->rsp, Padding->"Periodic"],
{x, 1, 2 kernels}];
pct2 = ImageAssemble[Table[{pcr2[[x]]}, {x, 2 kernels, 1, -1}]];
pcr3 = ParallelTable[
ImageTransformation[pic7, fpt, DataRange->{{-1, 1}, {0, 1}},
PlotRange->{{-1, 1}, {-1+(x-1)/kernels, -1+x/kernels}}, Resampling->rsp, Padding->"Periodic"],
{x, 1, 2 kernels}];
pct3 = ImageAssemble[Table[{pcr3[[x]]}, {x, 2 kernels, 1, -1}]];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 3) Funktionen |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
g11 = gtt = 1+(-4 r0+2 ℧^2)/(a^2+2 r0^2+a^2 Cos[2 θ0]);
g22 = grr = -((a^2+2 r0^2+a^2 Cos[2 θ0])/(2 (a^2+r0^2)));
g33 = gθθ = -r0^2-a^2 Cos[θ0]^2;
g44 = gφφ = (-(a^2+r0^2)^2 Sin[θ0]^2+a^2 (a^2+(-2+r0) r0+℧^2) Sin[θ0]^4)/(r0^2+a^2 Cos[θ0]^2);
g12 = gtr = -(Sqrt[2 r0-℧^2]/Sqrt[a^2+r0^2]);
g14 = gtφ = (a (2 r0-℧^2) Sin[θ0]^2)/(r0^2+a^2 Cos[θ0]^2);
g24 = grφ = (a Sqrt[2 r0-℧^2] Sin[θ0]^2)/Sqrt[a^2+r0^2];
g13 = g23 = g34 = 0;
rA = 1+Sqrt[1-a^2-℧^2];
rI = 1-Sqrt[1-a^2-℧^2];
rE = 1+Sqrt[1-℧^2-a^2 Cos[θ0]^2];
rG = 1-Sqrt[1-℧^2-a^2 Cos[θ0]^2];
q = 0;
Σ = r0^2+a^2 Cos[θ0]^2;
Δ = r0^2-2 r0+a^2+℧^2;
Χ = (r0^2+a^2)^2-a^2 Sin[θ0]^2 Δ;
Σs[rs_] := rs^2;
Δs[rs_] := rs^2-2 rs+a^2+℧^2;
Χs[rs_] := (rs^2+a^2)^2-a^2 Δs[rs];
κs[rs_] := a;
Σj[rt_, θt_] := rt^2+a^2 Cos[θt]^2;
Δj[rt_, θt_] := rt^2-2 rt+a^2+℧^2;
Χj[rt_, θt_] := (rt^2+a^2)^2-a^2 Sin[θt]^2 Δj[rt, θt];
ωj[rt_, θt_] := (a(2 rt-℧^2))/Χj[rt, θt];
ωR1 = ωj[R1, π/2];
ς = Abs@Sqrt[Χ/Δ/Σ]; ςr[rs_] := Abs@Sqrt[Χs[rs]/Δs[rs]/Σs[rs]];
μ = If[Abs[N@v0]==1.0, 0, -1];
j[v_] := Sqrt[1-v^2];
Ы[rs_] := Sqrt[Χs[rs]/Σs[rs]];
ωs[rs_] := (a (2 rs - ℧^2))/Χs[rs];
ε[rs_, vt_] := Sqrt[Δs[rs] Σs[rs]/Χs[rs]]/j[vt]+Lz[rs, vt] ωs[rs];
Lz[rs_, vt_] := vt Ы[rs]/j[vt];
nq[x_] := If[NumericQ[x], If[Element[x, Reals], x, 0], 0];
dΘF = Quiet[If[vLF==0, 0, ArcCos[-vθF/Sqrt[vrF^2+vθF^2+vφF^2]]]];
dθF = Quiet[If[vLF==0, 0, If[vrF>0, -dΘF, +dΘF]]];
dΦF = Quiet[If[vLF==0, 0, ArcTan[Abs[vφF]/vrF]]];
dφF = Quiet[If[vLF==0, 0, If[vrF!=0, -1, 1] If[vφF<0, +1, -1] If[NumericQ[dΦF], dΦF, π/2]]];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 4) Geschwindigkeitskomponenten ||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
εj[rt_, δt_, δr_, δθ_, δφ_] := (δt-δr Sqrt[(2rt-℧^2)/(a^2+rt^2)]/(1-(2rt-℧^2)/(a^2+
rt^2))) (1-(2 rt-℧^2)/rt^2)+(a (δφ-δr a Sqrt[(2rt-℧^2)/(a^2+rt^2)]/(1-(2rt-℧^2)/(a^2+
rt^2))/(a^2+rt^2)) (2 rt-℧^2))/rt^2;
vrj[rt_, δt_, δr_, δθ_, δφ_] := δr/Sqrt[Δj[rt, θt]] Sqrt[Σj[rt, π/2]];
vθj[rt_, δt_, δr_, δθ_, δφ_] := δθ Sqrt[Σj[rt, π/2]];
vφj[rt_, δt_, δr_, δθ_, δφ_] := (-(((a^2 Cos[(π/2)]^2+rt^2) (a^2+℧^2-2 rt+
rt^2) Sin[(π/2)] (-(δφ-δr a Sqrt[(2rt-℧^2)/(a^2+rt^2)]/(1-(2rt-℧^2)/(a^2+rt^2))/(a^2+rt^2))-
(a q ℧ rt)/((a^2 Cos[(π/2)]^2+rt^2) (a^2+℧^2-2 rt+rt^2))+
(εj[rt, δt, δr, δθ, δφ] Csc[(π/2)]^2 (a (-a^2-℧^2+2 rt-rt^2) Sin[(π/2)]^2+a (a^2+
rt^2) Sin[(π/2)]^2))/((a^2 Cos[(π/2)]^2+rt^2) (a^2+℧^2-2 rt+rt^2))+(a q ℧ rt (a^2+
℧^2-2 rt+rt^2-a^2 Sin[(π/2)]^2))/((a^2 Cos[(π/2)]^2+rt^2)^2 (a^2+℧^2-2 rt+
rt^2))))/((a^2+℧^2-2 rt+rt^2-a^2 Sin[(π/2)]^2) Sqrt[((a^2+rt^2)^2-
a^2 (a^2+℧^2-2 rt+rt^2) Sin[(π/2)]^2)/(a^2 Cos[(π/2)]^2+rt^2)])));
vtj[rt_, δt_, δr_, δθ_, δφ_] := Sqrt[vrj[rt, δt, δr, δθ, δφ]^2+
vθj[rt, δt, δr, δθ, δφ]^2+vφj[rt, δt, δr, δθ, δφ]^2];
vφt[rt_, δt_, δr_, δθ_, δφ_] := vφj[rt, δt, δr, δθ, δφ]/vtj[rt, δt, δr, δθ, δφ];
shf[rt_, δt_, δr_, δθ_, δφ_] := Abs[ς/ςr[rt] Sqrt[1-vs[rt]^2]/(1-vs[rt] vφt[rt, δt, δr, δθ, δφ])];
dφv[rt_, tt_] := tt φs[rt]/ts[rt];
vsolve = Block[{r=r0, θ=θ0, μ=-1, q=0},
ini = NSolve[
vr ==
(Sqrt[2] Sqrt[1-μ^2 vL^2] ((q μ^2 ℧ r Sqrt[-℧^2+2 r] vL^2)/((a^2+℧^2+
(-2+r) r) Sqrt[a^2+r^2])+((a^2+a^2 Cos[2 θ]+2 r^2) dR)/(2 (a^2+r^2))+(Sqrt[-℧^2+2 r] (dT-
a Sin[θ]^2 dΦ))/Sqrt[a^2+r^2]))/Sqrt[(a^2+a^2 Cos[2 θ]+2 r^2)/(a^2+r^2)]
&&
vϑ ==
Sqrt[a^2 Cos[θ]^2+r^2] Sqrt[1-μ^2 vL^2] dΘ
&&
vφ ==
(Sin[θ]^2 Sqrt[1-μ^2 vL^2] (a q μ^2 ℧ r Sqrt[a^2+r^2] vL^2-1/2 a Sqrt[-℧^2+2 r] (a^2+
a^2 Cos[2 θ]+2 r^2) dR+Sqrt[a^2+r^2] (a (℧^2-2 r) dT+((a^2+r^2)^2-a^2 (a^2+℧^2-2 r+
r^2) Sin[θ]^2) dΦ)))/(Sqrt[a^2+r^2] (a^2 Cos[θ]^2+r^2) Sqrt[(Sin[θ]^2 ((a^2+r^2)^2-
a^2 (a^2+℧^2-2 r+r^2) Sin[θ]^2))/(a^2 Cos[θ]^2+r^2)])
&&
-μ ==
-(((a^2+2 r^2+
a^2 Cos[2 θ]) (dR)^2)/(2 (a^2+r^2)))-(2 Sqrt[2 r-℧^2] dR dT)/Sqrt[a^2+r^2]+(1+(-4 r+
2 ℧^2)/(a^2+2 r^2+a^2 Cos[2 θ])) (dT)^2+(-r^2-a^2 Cos[θ]^2) dΘ^2+(2 a Sqrt[2 r-
℧^2] Sin[θ]^2 dR dΦ)/Sqrt[a^2+r^2]+(2 a (2 r-℧^2) Sin[θ]^2 dT dΦ)/(r^2+a^2 Cos[θ]^2)+
((-(a^2+r^2)^2 Sin[θ]^2+a^2 (a^2+(-2+r) r+℧^2) Sin[θ]^4) (dΦ)^2)/(r^2+a^2 Cos[θ]^2)
&&
dT > 0,
{dT, dR, dΘ, dΦ},
Reals];
β = -Sqrt[(2r-℧^2)/(a^2+r^2)];
drf = (dR/.ini[[1]]);
dθf = (dΘ/.ini[[1]]);
dΔf = drf a β/(1-β^2)/(a^2+r^2);
dφf = (dΦ/.ini[[1]])-dΔf;
dφF = (dΦ/.ini[[1]])+dΔf;
{
NSolve[
vrf ==
Sqrt[(a^2 Cos[θ]^2+r^2)/(a^2+℧^2-2 r+r^2)] Sqrt[1-μ^2 v0f^2] drf
&&
vϑf == Sqrt[a^2 Cos[θ]^2+r^2] Sqrt[1-μ^2 v0f^2] dθf
&&
vφf == (Sin[θ]^2 Sqrt[1-μ^2 v0f^2] (a q μ^2 ℧ r v0f^2+a (℧^2-2 r) dtf+((a^2+r^2)^2-
a^2 (a^2+℧^2-2 r+r^2) Sin[θ]^2) dφf))/((a^2 Cos[θ]^2+r^2) Sqrt[(Sin[θ]^2 ((a^2+
r^2)^2-a^2 (a^2+℧^2-2 r+r^2) Sin[θ]^2))/(a^2 Cos[θ]^2+r^2)])
&&
v0f == Sqrt[vrf^2+vϑf^2+vφf^2]
&&
-μ == -(((r^2+a^2 Cos[θ]^2) drf^2)/(a^2-2 r+r^2+℧^2))+((a^2-2 r+r^2+℧^2-
a^2 Sin[θ]^2) (dtf)^2)/(r^2+a^2 Cos[θ]^2)+(-r^2-a^2 Cos[θ]^2) dθf^2+(2 a (2 r-
℧^2) Sin[θ]^2 dtf dφf)/(r^2+a^2 Cos[θ]^2)+((-(a^2+r^2)^2 Sin[θ]^2+a^2 (a^2-2 r+
r^2+℧^2) Sin[θ]^4) dφf^2)/(r^2+a^2 Cos[θ]^2)
&&
dtf>0,
{dtf, vrf, vϑf, vφf, v0f}],
NSolve[
vrf ==
Sqrt[(a^2 Cos[θ]^2+r^2)/(a^2+℧^2-2 r+r^2)] Sqrt[1-μ^2 v0f^2] drf
&&
vϑf == Sqrt[a^2 Cos[θ]^2+r^2] Sqrt[1-μ^2 v0f^2] dθf
&&
vφf == (Sin[θ]^2 Sqrt[1-μ^2 v0f^2] (a q μ^2 ℧ r v0f^2+a (℧^2-2 r) dtf+((a^2+r^2)^2-
a^2 (a^2+℧^2-2 r+r^2) Sin[θ]^2) dφF))/((a^2 Cos[θ]^2+r^2) Sqrt[(Sin[θ]^2 ((a^2+
r^2)^2-a^2 (a^2+℧^2-2 r+r^2) Sin[θ]^2))/(a^2 Cos[θ]^2+r^2)])
&&
v0f == Sqrt[vrf^2+vϑf^2+vφf^2]
&&
-μ == -(((r^2+a^2 Cos[θ]^2) drf^2)/(a^2-2 r+r^2+℧^2))+((a^2-2 r+r^2+℧^2-
a^2 Sin[θ]^2) (dtf)^2)/(r^2+a^2 Cos[θ]^2)+(-r^2-a^2 Cos[θ]^2) dθf^2+(2 a (2 r-
℧^2) Sin[θ]^2 dtf dφF)/(r^2+a^2 Cos[θ]^2)+((-(a^2+r^2)^2 Sin[θ]^2+a^2 (a^2-2 r+
r^2+℧^2) Sin[θ]^4) dφF^2)/(r^2+a^2 Cos[θ]^2)
&&
dtf>0,
{dtf, vrf, vϑf, vφf, v0f}]
}];
vrFx = Quiet[vrf/.vsolve[[1]]][[1]];
vθFx = Quiet[vϑf/.vsolve[[1]]][[1]];
vφFx = Quiet[vφf/.vsolve[[1]]][[1]];
VrFx = Quiet[vrf/.vsolve[[2]]][[1]];
VθFx = Quiet[vϑf/.vsolve[[2]]][[1]];
VφFx = Quiet[vφf/.vsolve[[2]]][[1]];
vθF = Quiet[Re[vθFx]+Im[vθFx]];
vφF = Quiet[Re[vφFx]+Im[vφFx]];
vLF = Quiet[Sqrt[vrFx^2+vθF^2+vφF^2]];
vrF = Quiet[If[vLF<1,vrFx,-vrFx]];
VθF = Quiet[Re[VθFx]+Im[VθFx]];
VφF = Quiet[Re[VφFx]+Im[VφFx]];
VLF = Quiet[Sqrt[VrFx^2+VθF^2+VφF^2]];
VrF = Quiet[If[VLF<1,VrFx,-VrFx]];
vθ =-vϑ;
θs = π/2;
θi =-θ0+π;
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 5) Photonensphäre und ISCO ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
rp = ц/.Solve[4 a^2 (ц-℧^2)-(ц^2-3 ц+2 ℧^2)^2==0 && ц>=If[Element[rA, Reals], rA, 0], ц];
rP = 1.01 Min[rp]; Rp = 1.01 Max[rp];
isco = Quiet[Min[RI/.NSolve[0 == RI (6 RI-RI^2-9 ℧^2+3 a^2)+4 ℧^2 (℧^2-a^2)-8 a (RI-
℧^2)^(3/2) && RI>=If[Element[rA, Reals], rA, 0], RI]]];
{"r horizon" -> N@rA, "r ergosphere" -> N@rE, "r isco" -> N@isco,
"r photon pro" -> N@Min[rp], "r photon ret" -> N@Max[rp], "r disk" -> N@sr,
"r observer" -> N@r0, "θ observer" -> N@θ0 180/π}
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 6) Geschwindigkeit und Zeitdilatation auf der Scheibe |||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
red[rs_] := Quiet[Reduce[
dt == (Lz[rs, vt] (-a (a^2+rs^2)+Δs[rs] κs[rs])+ε[rs, vt] ((a^2+rs^2)^2-
Δs[rs] κs[rs]^2))/(Δs[rs] Σs[rs])
&&
0 == ((a^2+(-2+rs) rs+℧^2) (16 a dt dΦ rs (rs-℧^2)+8 dt^2 rs (-rs+℧^2)+
dΦ^2 rs (8 rs (-a^2+rs^3)+a^2 (4 a^2+4 ℧^2-4 (a-℧) (a+℧)))))/(8 rs^6)
&&
dΦ == (Lz[rs, vt] (-a^2+Δs[rs])+ε[rs, vt] (a (a^2+rs^2)-Δs[rs] κs[rs]))/(Δs[rs] Σs[rs])
&&
vt > 0,
{vt, dΦ, dt},
Reals]];
vs = Interpolation[ParallelTable[{rr, If[Quiet@NumericQ[red[rr][[1, 2]]],
red[rr][[1, 2]], 0]}, {rr, 0, sr, st}]];
φs = Interpolation[ParallelTable[{rr, If[Quiet@NumericQ[red[rr][[2, 2]]],
red[rr][[2, 2]], 0]}, {rr, 0, sr, st}]];
ts = Interpolation[ParallelTable[{rr, If[Quiet@NumericQ[red[rr][[3, 2]]],
red[rr][[3, 2]], 0]}, {rr, 0, sr, st}]];
"Akkretionsscheibe:"
plot[func_, label_] := Plot[func, {rr, si, sr},
GridLines -> {{nq[Min[rp]], nq[Max[rp]], nq[rA], nq[si], nq[isco], nq[rE], nq[sr]}, {}},
Frame -> True, ImagePadding -> {{40, 12}, {12, 12}}, ImageSize -> 340,
PlotLabel -> label, PlotRange->{{0, sr}, All}]
Grid[{{
plot[Sqrt[Χs[rr]/Δs[rr]/Σs[rr]], "Gravitational time dilation: y=dt/dт, x=r"],
plot[φs[rr]/ts[rr], "Shapirodelayed angular velocity: y=dφ/dt, x=r"]},{
plot[ts[rr], "Total time dilation: y=dt/dτ, x=r"],
plot[φs[rr], "Coordinate speed: y=dφ/dτ, x=r"]}, {
plot[(a (2 rr-℧^2))/((a^2+rr^2)^2-a^2 (a^2-2 rr+rr^2+℧^2)), "Frame Dragging: y=dφ/dт, x=r"],
plot[vs[rr], "Local velocity: y=v=dl/dτ, x=r"]}}]
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 7) Frame Dragging und Gammafaktor |||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
й0 = (a (2 r0-℧^2) Sin[θ0] Sqrt[((a^2+r0^2)^2-a^2 (a^2-2 r0+r0^2+℧^2) Sin[θ0]^2)/((a^2-
2 r0+r0^2+℧^2) (r0^2+a^2 Cos[θ0]^2))])/((r0^2+a^2 Cos[θ0]^2) Sqrt[((a^2+r0^2)^2-a^2 (a^2-
2 r0+r0^2+℧^2) Sin[θ0]^2)/(r0^2+a^2 Cos[θ0]^2)]);
vя = Sqrt[((a^2+r0^2)(℧^2-2r0))/(a^2 Sin[θ0]^2(a^2+(r0-2)r0+℧^2)-(a^2+r0^2)^2)];
vR = Sqrt[(2 r0-℧^2)/(a^2+r0^2)];
U = {+vr, +vθ, +vφ};
γ = 1/Sqrt[1-Norm[U]^2];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 8) Rotationsmatrix für die auf der Sichtebene eintreffenden Strahlen ||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
Xyz[{x_, y_, z_}, α_] := {x Cos[α]-y Sin[α], x Sin[α]+y Cos[α], z};
xYz[{x_, y_, z_}, β_] := {x Cos[β]+z Sin[β], y, z Cos[β]-x Sin[β]};
xyZ[{x_, y_, z_}, ψ_] := {x, y Cos[ψ]-z Sin[ψ], y Sin[ψ]+z Cos[ψ]};
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 9) Raytracing Funktionscontainer ||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
raytracer[{Ф_, ϑ_}] :=
Quiet[Module[{DGL, sol, εj, pθi, pr0, Q, k, V, W, vw,
vr0i, vθ0i, vφ0i, vr0n, vθ0n, vφ0n, vr0a, vθia, vφ0a, vt0a,
t10, r10, Θ10, Φ10, t, r, θ, φ, τ,
т, т0, т1, т2, т3, т4, т5,
plunge, plunge0, plunge1, plunge2, plunge3,
plunge4, plunge5, plunge6, plunge7,
dθ0, dφ0, δφ0, δθ0, δr0, δt0, tt0, rt0, θt0, φt0,
dθ1, dφ1, δφ1, δθ1, δr1, δt1, tt1, rt1, θt1, φt1,
dθ2, dφ2, δφ2, δθ2, δr2, δt2, tt2, rt2, θt2, φt2,
dθ3, dφ3, δφ3, δθ3, δr3, δt3, tt3, rt3, θt3, φt3,
dθ4, dφ4, δφ4, δθ4, δr4, δt4, tt4, rt4, θt4, φt4,
dθ5, dφ5, δφ5, δθ5, δr5, δt5, tt5, rt5, θt5, φt5,
dθ6, dφ6, δφ6, δθ6, δr6, δt6, tt6, rt6, θt6, φt6,
X, Y, Z, ξ, stepsize, laststep, mtl, ft, fτ, varb,
ft0s, ft1s, ft2s, ft3s, ft4s,
ft0v, ft1v, ft2v, ft3v, ft4v, ft5v,
ft0f, ft1f, ft2f, ft3f, ft4f, ft5f,
ft0F, ft1F, ft2F, ft3F, ft4F, ft5F,
ft5h, ft5b, ft5x, ft5y,
dt0y, dr0y, dθ0y, dφ0y,
initcon, shF, ShF},
vw=xyZ[Xyz[{0, 1, 0}, ϑ], Ф+π/2];
(* Übersetzung des Einfallswinkels in den lokalen Tetrad *)
vr0a = vw[[3]];
vφ0a = vw[[2]];
vθia = vw[[1]];
(* Betrag *)
vt0a = Sqrt[vr0a^2+vφ0a^2+vθia^2];
(* Normierung *)
vr0n = vr0a/vt0a;
vφ0n = vφ0a/vt0a;
vθ0n = vθia/vt0a;
(* Relativistische Geschwindigkeitsaddition *)
V={vr0n, vθ0n, vφ0n};
W=(U+V+γ/(1+γ)(U\[Cross](U\[Cross]V)))/(1+U.V);
(* Aberration *)
vr0i = W[[1]];
vθ0i = W[[2]];
vφ0i = W[[3]];
shF = Abs[If[vLF==0, 1, Sqrt[1-vLF^2]/(1+vLF (-Cos[If[vrF>0, -dΘF, +dΘF]] Sin[ϑ]-
Sin[If[vrF>0, -dΘF, +dΘF]] (Cos[-Ф-π/2+If[vrF>0, -1,
1] ArcSin[vφF/vLF]] Cos[ϑ] Cos[1/2 π If[vφF<0,
1, -1] If[vrF!=0,-1,1]]-Cos[ϑ] Sin[-Ф-π/2+
If[vrF>0, -1, +1]ArcSin[vφF/vLF]] Sin[1/2 π])))]];
ShF = Abs[If[VLF==0, 1, Sqrt[1-VLF^2]/(1+VLF (-Cos[If[VrF>0, -dΘF, +dΘF]] Sin[ϑ]-
Sin[If[VrF>0, -dΘF, +dΘF]] (Cos[-Ф-π/2+If[VrF>0, -1,
1] ArcSin[VφF/VLF]] Cos[ϑ] Cos[1/2 π If[VφF<0,
1, -1] If[VrF!=0,-1,1]]-Cos[ϑ] Sin[-Ф-π/2+
If[VrF>0, -1, +1]ArcSin[VφF/VLF]] Sin[1/2 π])))]];
initcon = TimeConstrained[NSolve[
vr0i ==
N[(Sqrt[2] Sqrt[1-μ^2 v0^2] ((q μ^2 ℧ r0 Sqrt[-℧^2+2 r0] v0^2)/((a^2+℧^2+(-2+
r0) r0) Sqrt[a^2+r0^2])+((a^2+a^2 Cos[2 θi]+2 r0^2) dr0y)/(2 (a^2+r0^2))+(Sqrt[-℧^2+
2 r0] (dt0y-a Sin[θi]^2 dφ0y))/Sqrt[a^2+r0^2]))/Sqrt[(a^2+a^2 Cos[2 θi]+2 r0^2)/(a^2+r0^2)]]
&&
vθ0i ==
N[Sqrt[a^2 Cos[θi]^2+r0^2] Sqrt[1-μ^2 v0^2] dθ0y]
&&
vφ0i ==
N[(Sin[θi]^2 Sqrt[1-μ^2 v0^2] (a q μ^2 ℧ r0 Sqrt[a^2+r0^2] v0^2-1/2 a Sqrt[-℧^2+2 r0] (a^2+
a^2 Cos[2 θi]+2 r0^2) dr0y+Sqrt[a^2+r0^2] (a (℧^2-2 r0) dt0y+((a^2+r0^2)^2-a^2 (a^2+℧^2-
2 r0+r0^2) Sin[θi]^2) dφ0y)))/(Sqrt[a^2+r0^2] (a^2 Cos[θi]^2+r0^2) Sqrt[(Sin[θi]^2 ((a^2+
r0^2)^2-a^2 (a^2+℧^2-2 r0+r0^2) Sin[θi]^2))/(a^2 Cos[θi]^2+r0^2)])]
&&
-μ ==
N[-(((a^2+2 r0^2+a^2 Cos[2 θi]) (dr0y)^2)/(2 (a^2+r0^2)))-(2 Sqrt[2 r0-
℧^2] dr0y dt0y)/Sqrt[a^2+r0^2]+(1+(-4 r0+2 ℧^2)/(a^2+2 r0^2+a^2 Cos[2 θi])) (dt0y)^2+
(-r0^2-a^2 Cos[θi]^2) dθ0y^2+(2 a Sqrt[2 r0-℧^2] Sin[θi]^2 dr0y dφ0y)/Sqrt[a^2+
r0^2]+(2 a (2 r0-℧^2) Sin[θi]^2 dt0y dφ0y)/(r0^2+a^2 Cos[θi]^2)+((-(a^2+r0^2)^2 Sin[θi]^2+
a^2 (a^2+(-2+r0) r0+℧^2) Sin[θi]^4) (dφ0y)^2)/(r0^2+a^2 Cos[θi]^2)]
&&
dt0y > 0,
{dθ0y, dr0y, dt0y, dφ0y}, Reals], 3];
DGL = If[NumericQ[dt0y /. initcon[[1]]] == False, {}, { (* Bewegungsgleichungen *)
t''[τ] == Re[1/(8 (a^2 Cos[θ[τ]]^2+r[τ]^2)^3) (8 q ℧ (-a^4 Cos[θ[τ]]^4+r[τ]^4) r'[τ]+
(8 (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-r[τ]^2) (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 r'[τ]^2)/(Sqrt[-℧^2+
2 r[τ]] Sqrt[a^2+r[τ]^2])+8 q ℧ Sqrt[-℧^2+2 r[τ]] Sqrt[a^2+r[τ]^2] (-a^2 Cos[θ[τ]]^2+
r[τ]^2) t'[τ]+16 (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-r[τ]^2) (a^2 Cos[θ[τ]]^2+r[τ]^2) r'[τ] t'[τ]+
8 Sqrt[-℧^2+2 r[τ]] (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-r[τ]^2) Sqrt[a^2+r[τ]^2] t'[τ]^2-
8 a^2 q ℧ r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2) Sin[2 θ[τ]] θ'[τ]+(8 a^2 Sqrt[-℧^2+
2 r[τ]] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 Sin[2 θ[τ]] r'[τ] θ'[τ])/Sqrt[a^2+r[τ]^2]-8 a^2 (℧^2-
2 r[τ]) (a^2 Cos[θ[τ]]^2+r[τ]^2) Sin[2 θ[τ]] t'[τ] θ'[τ]+8 r[τ] Sqrt[-℧^2+
2 r[τ]] Sqrt[a^2+r[τ]^2] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 θ'[τ]^2-8 a q ℧ Sqrt[-℧^2+
2 r[τ]] Sqrt[a^2+r[τ]^2] (-a^2 Cos[θ[τ]]^2+r[τ]^2) Sin[θ[τ]]^2 φ'[τ]-
16 a (a^2 Cos[θ[τ]]^2+(℧^2-r[τ]) r[τ]) (a^2 Cos[θ[τ]]^2+r[τ]^2) Sin[θ[τ]]^2 r'[τ] φ'[τ]-
16 a Sqrt[-℧^2+2 r[τ]] (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-r[τ]^2) Sqrt[a^2+
r[τ]^2] Sin[θ[τ]]^2 t'[τ] φ'[τ]+16 a^3 Cos[θ[τ]] (℧^2-2 r[τ]) (a^2 Cos[θ[τ]]^2+
r[τ]^2) Sin[θ[τ]]^3 θ'[τ] φ'[τ]+Sqrt[-℧^2+2 r[τ]] Sqrt[a^2+r[τ]^2] (a^4+
a^4 Cos[4 θ[τ]] (-1+r[τ])+3 a^4 r[τ]+4 a^2 ℧^2 r[τ]-4 a^2 r[τ]^2+8 a^2 r[τ]^3+
8 r[τ]^5+4 a^2 Cos[2 θ[τ]] r[τ] (a^2-℧^2+r[τ]+2 r[τ]^2)) Sin[θ[τ]]^2 φ'[τ]^2)],
t'[0] == dt0y/.initcon[[1]],
t[0] == 0,
r''[τ] == Re[1/(8 (a^2 Cos[θ[τ]]^2+r[τ]^2)^3) (-8 q ℧ Sqrt[-℧^2+2 r[τ]] Sqrt[a^2+
r[τ]^2] (-a^2 Cos[θ[τ]]^2+r[τ]^2) r'[τ]+(8 a^2 q ℧ Sqrt[-℧^2+2 r[τ]] (-a^2 Cos[θ[τ]]^2+
r[τ]^2) Sin[θ[τ]]^2 r'[τ])/Sqrt[a^2+r[τ]^2]+(4 (a^2 Cos[θ[τ]]^2+
r[τ]^2)^2 (a^2 Cos[2 θ[τ]] (-1+r[τ])-a^2 (1+r[τ])+2 r[τ] (-℧^2+r[τ])) r'[τ]^2)/(a^2+
r[τ]^2)-4 q ℧ (2 a^2 Cos[θ[τ]]^2-2 r[τ]^2) (a^2+r[τ]^2) (1+(℧^2-
2 r[τ])/(a^2 Cos[θ[τ]]^2+r[τ]^2)) t'[τ]+(8 a^2 q ℧ (℧^2-2 r[τ]) (a^2 Cos[θ[τ]]^2-
r[τ]^2) Sin[θ[τ]]^2 t'[τ])/(a^2 Cos[θ[τ]]^2+r[τ]^2)-(16 Sqrt[-℧^2+
2 r[τ]] (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-r[τ]^2) (a^2 Cos[θ[τ]]^2+
r[τ]^2) r'[τ] t'[τ])/Sqrt[a^2+r[τ]^2]+8 (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-r[τ]^2) (a^2+
℧^2-2 r[τ]+r[τ]^2) t'[τ]^2+8 a^2 (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 Sin[2 θ[τ]] r'[τ] θ'[τ]+
8 r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 (a^2+℧^2-2 r[τ]+r[τ]^2) θ'[τ]^2+(8 a q ℧ (℧^2-
2 r[τ]) (a^2 Cos[θ[τ]]^2-r[τ]^2) (a^2+r[τ]^2) Sin[θ[τ]]^2 φ'[τ])/(a^2 Cos[θ[τ]]^2+
r[τ]^2)-(4 a q ℧ (2 a^2 Cos[θ[τ]]^2-2 r[τ]^2) (-(a^2+r[τ]^2)^2 Sin[θ[τ]]^2+a^2 (a^2+
℧^2+(-2+r[τ]) r[τ]) Sin[θ[τ]]^4) φ'[τ])/(a^2 Cos[θ[τ]]^2+r[τ]^2)-(8 a Sqrt[-℧^2+
2 r[τ]] (a^2 Cos[θ[τ]]^2+r[τ]^2) (a^2 (-1+r[τ])+a^2 Cos[2 θ[τ]] (-1+r[τ])+
2 r[τ] (-℧^2+r[τ]+r[τ]^2)) Sin[θ[τ]]^2 r'[τ] φ'[τ])/Sqrt[a^2+r[τ]^2]-
16 a (a^2 Cos[θ[τ]]^2+(℧^2-r[τ]) r[τ]) (a^2+℧^2-2 r[τ]+
r[τ]^2) Sin[θ[τ]]^2 t'[τ] φ'[τ]+(a^2+℧^2-2 r[τ]+r[τ]^2) (a^4+a^4 Cos[4 θ[τ]] (-1+
r[τ])+3 a^4 r[τ]+4 a^2 ℧^2 r[τ]-4 a^2 r[τ]^2+8 a^2 r[τ]^3+8 r[τ]^5+
4 a^2 Cos[2 θ[τ]] r[τ] (a^2-℧^2+r[τ]+2 r[τ]^2)) Sin[θ[τ]]^2 φ'[τ]^2)],
r'[0] == dr0y/.initcon[[1]],
r[0] == r0,
θ''[τ] == Re[-1/(2 (a^2 Cos[θ[τ]]^2+r[τ]^2)^4) ((2 a^2 Cos[θ[τ]] (a^2 Cos[θ[τ]]^2+
r[τ]^2)^3 Sin[θ[τ]] r'[τ]^2)/(a^2+r[τ]^2)-2 a^2 q ℧ (℧^2-2 r[τ]) r[τ] Sin[2 θ[τ]] t'[τ]+
a^2 q ℧ r[τ] (a^2+2 ℧^2+a^2 Cos[2 θ[τ]]-4 r[τ]+2 r[τ]^2) Sin[2 θ[τ]] t'[τ]+
2 a^2 Cos[θ[τ]] (℧^2-2 r[τ]) (a^2 Cos[θ[τ]]^2+r[τ]^2) Sin[θ[τ]] t'[τ]^2+
4 r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2)^3 r'[τ] θ'[τ]-2 a^2 Cos[θ[τ]] (a^2 Cos[θ[τ]]^2+
r[τ]^2)^3 Sin[θ[τ]] θ'[τ]^2-4 a^3 q ℧ Cos[θ[τ]] (℧^2-2 r[τ]) r[τ] Sin[θ[τ]]^3 φ'[τ]+
4 a q ℧ Cot[θ[τ]] r[τ] (-(a^2+r[τ]^2)^2 Sin[θ[τ]]^2+a^2 (a^2+℧^2+(-2+
r[τ]) r[τ]) Sin[θ[τ]]^4) φ'[τ]+(2 a Sqrt[-℧^2+2 r[τ]] (a^2 Cos[θ[τ]]^2+
r[τ]^2)^3 Sin[2 θ[τ]] r'[τ] φ'[τ])/Sqrt[a^2+r[τ]^2]-2 a (℧^2-2 r[τ]) (a^2+
r[τ]^2) (a^2 Cos[θ[τ]]^2+r[τ]^2) Sin[2 θ[τ]] t'[τ] φ'[τ]+(a^2 Cos[θ[τ]]^2+
r[τ]^2) (2 a^2 Cos[θ[τ]] Sin[θ[τ]]^3 (-(a^2+r[τ]^2)^2+a^2 (a^2+℧^2+(-2+
r[τ]) r[τ]) Sin[θ[τ]]^2)+(a^2 Cos[θ[τ]]^2+r[τ]^2) (4 a^2 Cos[θ[τ]] (a^2+℧^2+
(-2+r[τ]) r[τ]) Sin[θ[τ]]^3-(a^2+r[τ]^2)^2 Sin[2 θ[τ]])) φ'[τ]^2)],
θ'[0] == dθ0y/.initcon[[1]],
θ[0] == θi,
φ''[τ] == Re[1/(4 (a^2 Cos[θ[τ]]^2+r[τ]^2)^3) ((4 a q ℧ (-a^4 Cos[θ[τ]]^4+r[τ]^4) r'[τ])/(a^2+
r[τ]^2)+(4 a (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-r[τ]^2) (a^2 Cos[θ[τ]]^2+
r[τ]^2)^2 r'[τ]^2)/(Sqrt[-℧^2+2 r[τ]] (a^2+r[τ]^2)^(3/2))+(4 a q ℧ Sqrt[-℧^2+
2 r[τ]] (-a^2 Cos[θ[τ]]^2+r[τ]^2) t'[τ])/Sqrt[a^2+r[τ]^2]+(8 a (a^2 Cos[θ[τ]]^2+(℧^2-
r[τ]) r[τ]) (a^2 Cos[θ[τ]]^2+r[τ]^2) r'[τ] t'[τ])/(a^2+r[τ]^2)+(4 a Sqrt[-℧^2+
2 r[τ]] (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-r[τ]^2) t'[τ]^2)/Sqrt[a^2+r[τ]^2]-
8 a q ℧ Cot[θ[τ]] r[τ] (a^2 Cos[θ[τ]]^2+r[τ]^2) θ'[τ]+(8 a Cot[θ[τ]] Sqrt[-℧^2+
2 r[τ]] (a^2 Cos[θ[τ]]^2+r[τ]^2)^2 r'[τ] θ'[τ])/Sqrt[a^2+r[τ]^2]-8 a Cot[θ[τ]] (℧^2-
2 r[τ]) (a^2 Cos[θ[τ]]^2+r[τ]^2) t'[τ] θ'[τ]+(4 a r[τ] Sqrt[-℧^2+2 r[τ]] (a^2 Cos[θ[τ]]^2+
r[τ]^2)^2 θ'[τ]^2)/Sqrt[a^2+r[τ]^2]-(4 a^2 q ℧ Sqrt[-℧^2+2 r[τ]] (-a^2 Cos[θ[τ]]^2+
r[τ]^2) Sin[θ[τ]]^2 φ'[τ])/Sqrt[a^2+r[τ]^2]+(8 (a^2 Cos[θ[τ]]^2+
r[τ]^2) (a^4 Cos[θ[τ]]^2 (-1+r[τ])-r[τ] (a^2 (a^2+℧^2-r[τ])+2 a^2 Cot[θ[τ]]^2 (a^2+
r[τ]^2)+Csc[θ[τ]]^2 (-a^4+r[τ]^4))) Sin[θ[τ]]^2 r'[τ] φ'[τ])/(a^2+r[τ]^2)-
(8 a^2 Sqrt[-℧^2+2 r[τ]] (a^2 Cos[θ[τ]]^2+℧^2 r[τ]-
r[τ]^2) Sin[θ[τ]]^2 t'[τ] φ'[τ])/Sqrt[a^2+r[τ]^2]-Cot[θ[τ]] (a^2 Cos[θ[τ]]^2+
r[τ]^2) (a^2 (3 a^2-4 ℧^2+4 (a^2+℧^2) Cos[2 θ[τ]]+a^2 Cos[4 θ[τ]])+
16 a^2 Cos[θ[τ]]^2 r[τ]^2+8 r[τ]^4+16 a^2 r[τ] Sin[θ[τ]]^2) θ'[τ] φ'[τ]+
(4 a Sqrt[-℧^2+2 r[τ]] Sin[θ[τ]]^2 (r[τ] (-a^4+r[τ]^4+a^2 (a^2+℧^2-r[τ]) Sin[θ[τ]]^2)+
Cos[θ[τ]]^2 (2 a^2 r[τ] (a^2+r[τ]^2)-a^4 (-1+r[τ]) Sin[θ[τ]]^2)) φ'[τ]^2)/Sqrt[a^2+r[τ]^2])],
φ'[0] == dφ0y/.initcon[[1]],
φ[0] == φ0,
WhenEvent[Abs[r[τ]] == N[R0]||Abs[r[τ]] > R0 &&
NumericQ[plunge6] == False,
(plunge6=τ) &&
(tt6=t[τ]) && (rt6=r[τ]) && (θt6=θ[τ]) && (φt6=φ[τ]);
"StopIntegration"],
WhenEvent[Abs[r[τ]] == N[R1] &&
NumericQ[plunge5] == False,
(plunge5=τ) && (tt5=t[τ]) && (rt5=r[τ]) && (θt5=θ[τ]) && (φt5=φ[τ]);
If[r0>R1, "StopIntegration"]],
WhenEvent[Mod[180/π Re[θ[τ]], 180] == 90.0 && r[τ]>N[si] &&
r[τ]<N[sr] && τ < -0.05 &&
NumericQ[plunge0] == False,
(plunge0=τ) &&
(tt0=t[τ]) && (rt0=r[τ]) && (θt0=θ[τ]) && (φt0=φ[τ]) &&
(δt0=t'[τ]) && (δr0=r'[τ]) && (δθ0=θ'[τ]) && (δφ0=φ'[τ])],
WhenEvent[Mod[180/π Re[θ[τ]], 180] == 90.0 && r[τ]>N[si] &&
r[τ]<N[sr] && Re[θ'[τ]]>0 && τ < -0.05 &&
NumericQ[plunge1] == False,
(plunge1=τ) &&
(tt1=t[τ]) && (rt1=r[τ]) && (θt1=θ[τ]) && (φt1=φ[τ]) &&
(δt1=t'[τ]) && (δr1=r'[τ]) && (δθ1=θ'[τ]) && (δφ1=φ'[τ])],
WhenEvent[Mod[180/π Re[θ[τ]], 180] == 90.0 && r[τ]>N[si] &&
r[τ]<N[sr] && Re[θ'[τ]]<0 && τ < -0.05 &&
NumericQ[plunge2] == False,
(plunge2=τ) &&
(tt2=t[τ]) && (rt2=r[τ]) && (θt2=θ[τ]) && (φt2=φ[τ]) &&
(δt2=t'[τ]) && (δr2=r'[τ]) && (δθ2=θ'[τ]) && (δφ2=φ'[τ])],
WhenEvent[Mod[180/π Re[θ[τ]], 180] == 90.0 && r[τ]>N[si] &&
r[τ]<N[sr] && Re[θ'[τ]]>0 &&
τ < plunge1-0.05 &&
NumericQ[plunge3]==False && NumericQ[plunge1] == True,
(plunge3=τ) &&
(tt3=t[τ]) && (rt3=r[τ]) && (θt3=θ[τ]) && (φt3=φ[τ]) &&
(δt3=t'[τ]) && (δr3=r'[τ]) && (δθ3=θ'[τ]) && (δφ3=φ'[τ])],
WhenEvent[Mod[180/π Re[θ[τ]], 180] == 90.0 && r[τ]>N[si] &&
r[τ]<N[sr] && Re[θ'[τ]]<0 &&
τ < plunge2-0.05 &&
NumericQ[plunge4] == False && NumericQ[plunge2] == True,
(plunge4=τ) &&
(tt4=t[τ]) && (rt4=r[τ]) && (θt4=θ[τ]) && (φt4=φ[τ]) &&
(δt4=t'[τ]) && (δr4=r'[τ]) && (δθ4=θ'[τ]) && (δφ4=φ'[τ])]
}];
(* Integrator *)
sol = TimeConstrained[If[NumericQ[dt0y /. initcon[[1]]] == False, {},
NDSolve[DGL, {t, r, θ, φ}, {τ, 0, tmax},
WorkingPrecision-> wp,
Method-> mta,
MaxSteps-> Infinity,
InterpolationOrder-> All,
StepMonitor :> (laststep=plunge7; plunge7=τ;
stepsize=plunge7-laststep;), Method->{"EventLocator",
"Event" :> (If[stepsize<1*^-4, 0, 1])}
]], 10];
ft5h=If[NumericQ[plunge5], {φt5-π, θt5+π/2}, {0, -π/2}];
ft5b=If[NumericQ[plunge6], {φt6-π, θt6+π/2}, {0, -π/2}];
ft5x=If[NumericQ[plunge6], {0, 1}, {0, 0}];
ft5y=If[NumericQ[plunge5], {0, 1}, {0, 0}];
ft0s=If[NumericQ[plunge0], {φt0, rt0}, {π, sr}];
ft1s=If[NumericQ[plunge1], {φt1, rt1}, {π, sr}];
ft2s=If[NumericQ[plunge2], {φt2, rt2}, {π, sr}];
ft3s=If[NumericQ[plunge3], {φt3, rt3}, {π, sr}];
ft4s=If[NumericQ[plunge4], {φt4, rt4}, {π, sr}];
ft0v=If[NumericQ[plunge0], {-dφv[rt0, tt0+t0+rT], 0}, {0, 0}];
ft1v=If[NumericQ[plunge1], {-dφv[rt1, tt1+t0+rT], 0}, {0, 0}];
ft2v=If[NumericQ[plunge2], {-dφv[rt2, tt2+t0+rT], 0}, {0, 0}];
ft3v=If[NumericQ[plunge3], {-dφv[rt3, tt3+t0+rT], 0}, {0, 0}];
ft4v=If[NumericQ[plunge4], {-dφv[rt4, tt4+t0+rT], 0}, {0, 0}];
ft5v=If[NumericQ[plunge5], {-(tt5+t0+rT) ωR1, 0}, {0, 0}];
ft0f=If[NumericQ[plunge0], {0, Min[fmax, shF shf[rt0, δt0, δr0, δθ0, δφ0]]}, {0, 0}];
ft1f=If[NumericQ[plunge1], {0, Min[fmax, shF shf[rt1, δt1, δr1, δθ1, δφ1]]}, {0, 0}];
ft2f=If[NumericQ[plunge2], {0, Min[fmax, shF shf[rt2, δt2, δr2, δθ2, δφ2]]}, {0, 0}];
ft3f=If[NumericQ[plunge3], {0, Min[fmax, shF shf[rt3, δt3, δr3, δθ3, δφ3]]}, {0, 0}];
ft4f=If[NumericQ[plunge4], {0, Min[fmax, shF shf[rt4, δt4, δr4, δθ4, δφ4]]}, {0, 0}];
ft5f={0, Min[fmax, ς shF]};
ft0F=If[NumericQ[plunge0], {0, Min[fmax, ShF shf[rt0, δt0, δr0, δθ0, δφ0]]}, {0, 0}];
ft1F=If[NumericQ[plunge1], {0, Min[fmax, ShF shf[rt1, δt1, δr1, δθ1, δφ1]]}, {0, 0}];
ft2F=If[NumericQ[plunge2], {0, Min[fmax, ShF shf[rt2, δt2, δr2, δθ2, δφ2]]}, {0, 0}];
ft3F=If[NumericQ[plunge3], {0, Min[fmax, ShF shf[rt3, δt3, δr3, δθ3, δφ3]]}, {0, 0}];
ft4F=If[NumericQ[plunge4], {0, Min[fmax, ShF shf[rt4, δt4, δr4, δθ4, δφ4]]}, {0, 0}];
ft5F={0, Min[fmax, ς ShF]};
{
ft0s, ft1s, ft2s, ft3s, ft4s,
ft0s+ft0v, ft1s+ft1v, ft2s+ft2v, ft3s+ft3v, ft4s+ft4v,
ft0f, ft1f, ft2f, ft3f, ft4f,
ft5h+ft5v, ft5b, ft5f, ft5x, ft5y,
ft0F, ft1F, ft2F, ft3F, ft4F, ft5F
}]];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 10) Memoryfunktion ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
mem : raytrace[{Ф_, ϑ_}] := mem = Quiet[Re[raytracer[{Ф, ϑ}]]];
ray01[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[01]];
ray02[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[02]];
ray03[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[03]];
ray04[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[04]];
ray05[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[05]];
ray06[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[06]];
ray07[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[07]];
ray08[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[08]];
ray09[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[09]];
ray10[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[10]];
ray11[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[11]];
ray12[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[12]];
ray13[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[13]];
ray14[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[14]];
ray15[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[15]];
ray16[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[16]];
ray17[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[17]];
ray18[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[18]];
ray19[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[19]];
ray20[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[20]];
ray21[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[21]];
ray22[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[22]];
ray23[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[23]];
ray24[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[24]];
ray25[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[25]];
ray26[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[26]];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 11) Proportionen ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
width1 = ImageDimensions[pic1][[1]]; height1 = ImageDimensions[pic1][[2]];
width2 = ImageDimensions[pic2][[1]]; height2 = ImageDimensions[pic2][[2]];
width3 = ImageDimensions[pic3][[1]]; height3 = ImageDimensions[pic3][[2]];
width4 = ImageDimensions[pic4][[1]]; height4 = ImageDimensions[pic4][[2]];
width5 = ImageDimensions[pic5][[1]]; height5 = ImageDimensions[pic5][[2]];
width6 = ImageDimensions[pic7][[1]]; height6 = ImageDimensions[pic7][[2]];
hzoom = If[breite>2 hoehe, 1/zoom, 1/zoom/2/hoehe*breite];
vzoom = If[breite>2 hoehe, 1/zoom*2 hoehe/breite, 1/zoom];
"Geschätzte Rechenzeit" -> 1.2 (AbsoluteTiming[Do[raytracer[{
RandomReal[{-π, π}]/zoom, RandomReal[{-π/2, π/2}]/zoom
}], {ü, 1, 50}]][[1]])/50*hoehe*breite/kernels/60 "Minuten"
FOV->{360.0 hzoom "degree", 180.0 vzoom "degree"}
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 12) Output ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
img = ParallelTable[{
(* 1 Hintergrundpanorama *)
Quiet@ImageTransformation[pct1, ray17, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-π, π-2π/width1},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+vvs/vzoom+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 2 Sphäre *)
Quiet@ImageTransformation[pct2, ray16, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-3π/2, π/2-2π/width2},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+π/kernels/grain+vvs/vzoom} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 3 Scheibe Textur komplett *)
Quiet@ImageTransformation[pic3, ray01, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 4 Scheibe Textur Front *)
Quiet@ImageTransformation[pic3, ray02, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 5 Scheibe Textur Echo 1 *)
Quiet@ImageTransformation[pic3, ray03, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 6 Scheibe Textur Echo 2 *)
Quiet@ImageTransformation[pic3, ray04, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 7 Scheibe Textur Echo 3 *)
Quiet@ImageTransformation[pic3, ray05, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 8 Scheibe Geometrie still komplett *)
Quiet@ImageTransformation[pic4, ray01, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 9 Scheibe Geometrie still Front *)
Quiet@ImageTransformation[pic4, ray02, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 10 Scheibe Geometrie still Echo 1 *)
Quiet@ImageTransformation[pic4, ray03, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 11 Scheibe Geometrie still Echo 2 *)
Quiet@ImageTransformation[pic4, ray04, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 12 Scheibe Geometrie still Echo 3 *)
Quiet@ImageTransformation[pic4, ray05, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 13 Scheibe Geometrie rotierend komplett *)
Quiet@ImageTransformation[pic4, ray06, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 14 Scheibe Geometrie rotierend Front *)
Quiet@ImageTransformation[pic4, ray07, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 15 Scheibe Geometrie rotierend Echo 1 *)
Quiet@ImageTransformation[pic4, ray08, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 16 Scheibe Geometrie rotierend Echo 2 *)
Quiet@ImageTransformation[pic4, ray09, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 17 Scheibe Geometrie rotierend Echo 3 *)
Quiet@ImageTransformation[pic4, ray10, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 18 Frequenzverschiebung komplett SW *)
Quiet@ImageTransformation[pic5, ray11, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-1, 1},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 19 Frequenzverschiebung Front SW *)
Quiet@ImageTransformation[pic5, ray12, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 20 Frequenzverschiebung Echo 1 SW *)
Quiet@ImageTransformation[pic5, ray13, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 21 Frequenzverschiebung Echo 2 SW *)
Quiet@ImageTransformation[pic5, ray14, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 22 Frequenzverschiebung Echo 3 SW *)
Quiet@ImageTransformation[pic5, ray15, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 23 Frequenzverschiebung komplett Farbe *)
Quiet@ImageTransformation[pic6, ray11, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 24 Frequenzverschiebung Front Farbe *)
Quiet@ImageTransformation[pic6, ray12, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 25 Frequenzverschiebung Echo 1 Farbe *)
Quiet@ImageTransformation[pic6, ray13, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 26 Frequenzverschiebung Echo 2 Farbe *)
Quiet@ImageTransformation[pic6, ray14, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 27 Frequenzverschiebung Echo 3 Farbe *)
Quiet@ImageTransformation[pic6, ray15, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 28 Hintergrundpanorama *)
ImageTransformation[pct3, ray17, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-π, π-2π/width6},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+vvs/vzoom+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 29 Sphäre *)
ImageTransformation[pct3, ray16, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-π, π-2π/width6},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+π/kernels/grain+vvs/vzoom} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 30 Scheibe Textur komplett *)
ImageTransformation[pic7, ray01, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width6},
{si, sr+(sr-si)/height6}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 31 Frequenzverschiebung Hintergrund Farbe *)
Quiet@ImageTransformation[pic6, ray18, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 32 Frequenzverschiebung Hintergrund SW *)
Quiet@ImageTransformation[pic5, ray18, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 33 Kontur BH *)
Quiet@ImageTransformation[pic5, ray19, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{0, 1}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 34 Kontur IH *)
Quiet@ImageTransformation[pic5, ray20, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{0, 1}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 35 Frequenzverschiebung komplett SW *)
Quiet@ImageTransformation[pic5, ray21, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-1, 1},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 36 Frequenzverschiebung Front SW *)
Quiet@ImageTransformation[pic5, ray22, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 37 Frequenzverschiebung Echo 1 SW *)
Quiet@ImageTransformation[pic5, ray23, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 38 Frequenzverschiebung Echo 2 SW *)
Quiet@ImageTransformation[pic5, ray24, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 39 Frequenzverschiebung Echo 3 SW *)
Quiet@ImageTransformation[pic5, ray25, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 40 Frequenzverschiebung komplett Farbe *)
Quiet@ImageTransformation[pic6, ray21, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 41 Frequenzverschiebung Front Farbe *)
Quiet@ImageTransformation[pic6, ray22, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 42 Frequenzverschiebung Echo 1 Farbe *)
Quiet@ImageTransformation[pic6, ray23, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 43 Frequenzverschiebung Echo 2 Farbe *)
Quiet@ImageTransformation[pic6, ray24, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 44 Frequenzverschiebung Echo 3 Farbe *)
Quiet@ImageTransformation[pic6, ray25, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 45 Frequenzverschiebung Hintergrund Farbe *)
Quiet@ImageTransformation[pic6, ray26, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"],
(* 46 Frequenzverschiebung Hintergrund SW *)
Quiet@ImageTransformation[pic5, ray26, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π},
{fmin, fmax}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Fixed"]
}, {x, 0, π-π/kernels/grain, π/kernels/grain}];
image[num_] := ImageAssemble[Table[{img[[x, num]]}, {x, kernels grain, 1, -1}]];
fi[x_] := ColorNegate[x];
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 13) Composite |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
Table[image[n], {n, 1, 46, 1}]
gr2 = ImageMultiply[fi@image[19], fi@image[20]];
Gr2 = ImageMultiply[fi@image[36], fi@image[37]];
gr3 = ImageMultiply[fi@image[21], fi@image[22]];
Gr3 = ImageMultiply[fi@image[38], fi@image[39]];
ds2 = ImageMultiply[fi@image[09], fi@image[10]];
ds3 = ImageMultiply[fi@image[11], fi@image[12]];
ds6 = ImageMultiply[fi@image[14], fi@image[15]];
ds7 = ImageMultiply[fi@image[16], fi@image[17]];
se2 = ImageMultiply[fi@image[04], fi@image[05]];
se3 = ImageMultiply[fi@image[06], fi@image[07]];
sea = ImageMultiply[image[04], image[19]];
seb = ImageMultiply[image[05], image[20]];
sec = ImageMultiply[image[06], image[21]];
sed = ImageMultiply[image[07], image[22]];
seA = ImageMultiply[image[04], image[36]];
seB = ImageMultiply[image[05], image[37]];
seC = ImageMultiply[image[06], image[38]];
seD = ImageMultiply[image[07], image[39]];
bl2 = ImageMultiply[fi@image[24], fi@image[25]];
bl3 = ImageMultiply[fi@image[26], fi@image[27]];
Bl2 = ImageMultiply[fi@image[41], fi@image[42]];
Bl3 = ImageMultiply[fi@image[43], fi@image[44]];
se5 = ImageMultiply[fi@sea, fi@seb];
se6 = ImageMultiply[fi@sec, fi@sed];
Se5 = ImageMultiply[fi@seA, fi@seB];
Se6 = ImageMultiply[fi@seC, fi@seD];
"Lösung 1, v local" == vsolve[[1, 1]]/.dtf->"dt"/.vrf->"vr"/.vφf->"vφ"/.vϑf->"vϑ"/.v0f->"v0"
"Lösung 2, v local" == vsolve[[2, 1]]/.dtf->"dt"/.vrf->"vr"/.vφf->"vφ"/.vϑf->"vϑ"/.v0f->"v0"
"Meistens gilt Lösung 1, im Bereich der Ergosphäre manchmal Lösung 2"
"äußere Kontur"
bf3 = image[33]
"innere Kontur"
bf4 = image[34]
"Hintergrund, Milchstraße"
bkg = image[1]
"Hintergrund, Checkerboard"
cb1 = image[28]
"Horizont, Schale"
hrz = image[2]
"Horizont, Checkerboard"
cb2 = image[29]
"statische Checkerboard Scheibe, Geometrie"
cb3 = image[30]
"statische undurchsichtige Scheibe, Geometrie"
ds1 = image[8]
"statische transparente Scheibe, Geometrie"
ds4 = fi@ImageMultiply[ds2, ds3]
"rotierende undurchsichtige Scheibe, Geometrie"
ds5 = image[13]
"rotierende transparente Scheibe, Geometrie"
ds8 = fi@ImageMultiply[ds6, ds7]
"Scheibe, Textur, undurchsichtig"
se1 = image[03]
"Scheibe, Textur, transparent"
se4 = fi@ImageMultiply[se2, se3]
"Frequenzverschiebung Hintergrund, Farbe, Lösung 1"
bf1 = image[31]
"Frequenzverschiebung Hintergrund, SW, Lösung 1"
bf2 = image[32]
"Scheibe, Textur, transparent, Helligkeit A, Lösung 1"
se7 = fi@ImageMultiply[se5, se6]
"Scheibe, Textur, transparent, Helligkeit B, Lösung 1"
se8 = fi@ImageMultiply[fi@se7, fi@se7]
"Scheibe, Textur, transparent, Helligkeit C, Lösung 1"
se9 = fi@ImageMultiply[fi@se8, fi@se7]
"Frequenzverschiebung, Farbe, undurchsichte Scheibe, Lösung 1"
bl1 = image[23]
"Frequenzverschiebung, Farbe, transparente Scheibe, Lösung 1"
bl4 = fi@ImageMultiply[bl2, bl3]
"Frequenzverschiebung, undurchsichtige Scheibe, SW, Lösung 1"
gr1 = image[18]
"Frequenzverschiebung, transparente Scheibe, SW, Lösung 1"
gr4 = fi@ImageMultiply[gr2, gr3]
"Frequenzverschiebung Hintergrund, Farbe, Lösung 2"
Bf1 = image[45]
"Frequenzverschiebung Hintergrund, SW, Lösung 2"
Bf2 = image[46]
"Scheibe, Textur, transparent, Helligkeit A, Lösung 2"
Se7 = fi@ImageMultiply[Se5, Se6]
"Scheibe, Textur, transparent, Helligkeit B, Lösung 2"
Se8 = fi@ImageMultiply[fi@Se7, fi@Se7]
"Scheibe, Textur, transparent, Helligkeit C, Lösung 2"
Se9 = fi@ImageMultiply[fi@Se8, fi@Se7]
"Frequenzverschiebung, Farbe, undurchsichte Scheibe, Lösung 2"
Bl1 = image[40]
"Frequenzverschiebung, Farbe, transparente Scheibe, Lösung 2"
Bl4 = fi@ImageMultiply[Bl2, Bl3]
"Frequenzverschiebung, undurchsichtige Scheibe, SW, Lösung 2"
Gr1 = image[35]
"Frequenzverschiebung, transparente Scheibe, SW, Lösung 2"
Gr4 = fi@ImageMultiply[Gr2, Gr3]
Quit[]
Transformation des Outputs im Plattkartenformat in die stereographische Projektion:
Code: Alles auswählen
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* > raytracing.yukterez.net | Equirectangular -> Stereographic Projection Transformation *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
size = 377;
xyz[{x_, y_}] := {Sin[y] Cos[x], Sin[y] Sin[x], Cos[y]}
xy[{x_, y_, z_}] := {ArcTan[x, y], ArcCos[z]}
Xyz[{x_, y_, z_}, α_] := {x Cos[α]-y Sin[α], x Sin[α]+y Cos[α], z}
xYz[{x_, y_, z_}, β_] := {x Cos[β]+z Sin[β], y, z Cos[β]-x Sin[β]}
xyZ[{x_, y_, z_}, ψ_] := {x, y Cos[ψ]-z Sin[ψ], y Sin[ψ]+z Cos[ψ]}
rm[pic_, α_, β_, ψ_] := xy[xyZ[xYz[Xyz[xyz[pic], α], β], ψ]]
RM[{x_, y_}] := rm[{x, y}, α, β, ψ]
Eq2St[{x_, y_}] := {0+ArcTan[-y, x], -2 ArcTan[2, Sqrt[x^2+y^2]]+π/2};
eq2st[{x_, y_}] := RM[Eq2St[{x, y}]+{0, Pi/2}]-{0, Pi/2}
Eq = Import["http://www.yukterez.net/mw/testdisk.png"]
pic := ImageTransformation[Eq, eq2st, {size, size},
DataRange -> {{-π, π}, {-π/2, π/2}},
PlotRange -> {{-2, 2}, {-2, 2}}, Padding -> "Fixed", Resampling -> "Nearest"];
α=0; β=-π/2; ψ=0;
pic1 = pic
α=0; β=+π/2; ψ=0;
pic2 = ImageRotate[pic, π]
Export["pic1.png", pic1]
Export["pic2.png", pic2]
Für den Umrechner der Lokalgeschwindigkeit vom einen System ins andere klick hier. Beispiel mit a=℧=0.3, θ=85°, r=50, ri=isco=4.826, ra=10:
Minkowski Raytracer:
Code: Alles auswählen
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* > raytracing.yukterez.net | 07.04.2018 - 09.09.2020 | Version 20 | Simon Tyran, Vienna *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
Pause[1] (* Minkowski Koordinaten *)
wp = MachinePrecision;
mt0 = Automatic;
mt1 = {"StiffnessSwitching", Method-> {"ExplicitRungeKutta", Automatic}};
mta = mt0; (* mt0 für Geschwindigkeit, mt1 für Genauigkeit *)
kernels = 6; (* Parallelisierung *)
grain = 5; (* Subparallelisierung auf kernels*grain Streifen *)
rsp = "Nearest"; (* Resampling *)
breite = 240; (* Zielabmessungen in Pixeln *)
hoehe = 120; (* Höhe sollte ein ganzzahliges Vielfaches von kernels*grain sein *)
zoom = 1; (* doppelter Zoom ergibt halben Sichtwinkel *)
LaunchKernels[kernels]
wp = MachinePrecision; (* Genauigkeit *)
pic1 = Import["http://www.yukterez.net/mw/1/flip70.png"]; (* Hintergrundpanorama laden *)
pic2 = Import["http://www.yukterez.net/mw/1/worldmap.png"]; (* Sphärenoberfläche laden *)
pic3 = Import["http://www.yukterez.net/mw/akkretionsscheibe.jpg"];(* Scheibentextur laden *)
pic4 = Import["http://www.yukterez.net/mw/disk.png"]; (* Scheibengeometrie laden *)
pic7 = Import["http://www.yukterez.net/mw/1/cl.png"]; (* Checkerboard laden *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
(* 1) Startbedingungen und Position des Beobachters ||||||||||||||||||||||||||||||||||||| *)
(* |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| *)
r0 = 10; (* Radialkoordinate des Beobachters *)
R0 = 500; (* Radius des umspannenden Kugelschalenpanoramas *)
R1 = 1+1/(5 Sqrt[2]); (* Sphäre *)
si = 1.6367824; (* Akkretionsscheibe Innenradius *)
sr = 7; (* Akkretionsscheibe Außenradius *)
θ0 = 70 π/180; (* Breitengrad *)
φ0 = 0; (* Längengrad *)
t0 = 0; (* Eigenzeit des Beobachters *)
tmax =-3 R0; (* zeitlicher Integrationsbereich *)
vr = 0; (* Radiale Geschwindigkeit des Beobachters *)
vϑ = 0; (* Polare Geschwindigkeit des Beobachters *)
vφ = 0; (* Azimutale Geschwindigkeit des Beobachters *)
vL = Sqrt[vr^2+vϑ^2+vφ^2];
hvs = 0; (* ArcSin[vφ/vL] *) (* horizontaler Versatz in Radianten *)
vvs = 0; (* ArcSin[vϑ/vL] *) (* vertikaler Versatz in Radianten *)
fpt[{x_, y_}] := {If[y<0, x+1, x], If[y<0, -y, y]}
pcr1 = ParallelTable[
ImageTransformation[pic1, fpt, DataRange->{{-1, 1}, {0, 1}},
PlotRange->{{-1, 1}, {-1+(x-1)/kernels, -1+x/kernels}}, Padding->"Periodic"],
{x, 1, 2 kernels}];
pct1 = ImageAssemble[Table[{pcr1[[x]]}, {x, 2 kernels, 1, -1}]];
pcr2 = ParallelTable[
ImageTransformation[pic2, fpt, DataRange->{{-1, 1}, {0, 1}},
PlotRange->{{-1, 1}, {-1+(x-1)/kernels, -1+x/kernels}}, Padding->"Periodic"],
{x, 1, 2 kernels}];
pct2 = ImageAssemble[Table[{pcr2[[x]]}, {x, 2 kernels, 1, -1}]];
pcr3 = ParallelTable[
ImageTransformation[pic7, fpt, DataRange->{{-1, 1}, {0, 1}},
PlotRange->{{-1, 1}, {-1+(x-1)/kernels, -1+x/kernels}}, Resampling->rsp, Padding->"Periodic"],
{x, 1, 2 kernels}];
pct3 = ImageAssemble[Table[{pcr3[[x]]}, {x, 2 kernels, 1, -1}]];
a = 0; ℧ = 0; v0 = 1; q = 0; st = 0.01; vϑ = 0;
vθ =-vϑ;
θs = π/2;
θi =-θ0+π;
θ1 = θi;
dφv[rt_, tt_] := 0;
shf[rt_, δt_, δr_, δθ_, δφ_] := 1;
ωφ = -vφ Csc[θ1]/r0;
ωθ = -vϑ/r0;
gtt = -1;
grr = +1;
gθθ = +r0^2;
gφφ = +r0^2 Sin[θ1]^2;
gtφ = +0;
ς = 1;
j[v_] := Sqrt[1-v^2];
nq[x_] := If[NumericQ[x], If[Element[x, Reals], x, 0], 0];
U = {+vr, +vθ, +vφ};
γ = 1/Sqrt[1-Norm[U]^2];
Xyz[{x_, y_, z_}, α_] := {x Cos[α]-y Sin[α], x Sin[α]+y Cos[α], z};
xYz[{x_, y_, z_}, β_] := {x Cos[β]+z Sin[β], y, z Cos[β]-x Sin[β]};
xyZ[{x_, y_, z_}, ψ_] := {x, y Cos[ψ]-z Sin[ψ], y Sin[ψ]+z Cos[ψ]};
raytracer[{Ф_, ϑ_}] :=
Quiet[Module[{DGL, sol, εj, pθi, pr0, Q, k, V, W, vw,
vr0i, vθ0i, vφ0i, vr0n, vθ0n, vφ0n, vr0a, vθia, vφ0a, vt0a,
t10, r10, Θ10, Φ10, t, r, θ, φ, τ,
т, т0, т1, т2, т3, т4, т5,
plunge, plunge0, plunge1, plunge2, plunge3,
plunge4, plunge5, plunge6, plunge7,
dθ0, dφ0, δφ0, δθ0, δr0, δt0, tt0, rt0, θt0, φt0,
dθ1, dφ1, δφ1, δθ1, δr1, δt1, tt1, rt1, θt1, φt1,
dθ2, dφ2, δφ2, δθ2, δr2, δt2, tt2, rt2, θt2, φt2,
dθ3, dφ3, δφ3, δθ3, δr3, δt3, tt3, rt3, θt3, φt3,
dθ4, dφ4, δφ4, δθ4, δr4, δt4, tt4, rt4, θt4, φt4,
dθ5, dφ5, δφ5, δθ5, δr5, δt5, tt5, rt5, θt5, φt5,
dθ6, dφ6, δφ6, δθ6, δr6, δt6, tt6, rt6, θt6, φt6,
X, Y, Z, ξ, stepsize, laststep, mtl, ft, fτ, varb,
ft0s, ft1s, ft2s, ft3s, ft4s,
ft0v, ft1v, ft2v, ft3v, ft4v, ft5v,
ft0f, ft1f, ft2f, ft3f, ft4f,
ft5h, ft5b, ft5f},
vw=xyZ[Xyz[{0, 1, 0}, ϑ], Ф+π/2];
(* Übersetzung des Einfallswinkels in den lokalen Tetrad *)
vr0a = vw[[3]];
vφ0a = vw[[2]];
vθia = vw[[1]];
(* Betrag *)
vt0a = Sqrt[vr0a^2+vφ0a^2+vθia^2];
(* Normierung *)
vr0n = vr0a/vt0a;
vφ0n = vφ0a/vt0a;
vθ0n = vθia/vt0a;
(* Relativistische Geschwindigkeitsaddition *)
V={vr0n, vθ0n, vφ0n};
W=(U+V+γ/(1+γ)(U\[Cross](U\[Cross]V)))/(1+U.V);
(* Aberration *)
vr0i = W[[1]];
vθ0i = W[[2]];
vφ0i = W[[3]];
DGL = { (* Minkowski Bewegungsgleichungen *)
t''[τ] == 0,
t'[0] == 1,
t[0] == 0,
r''[τ] == r[τ](θ'[τ]^2+Sin[θ[τ]]^2 φ'[τ]^2),
r'[0] == vr0i,
r[0] == r0,
θ''[τ] == Sin[θ[τ]] Cos[θ[τ]] φ'[τ]^2-2 θ'[τ] r'[τ]/r[τ],
θ'[0] == vθ0i/r0,
θ[0] == θi,
φ''[τ] == -2 φ'[τ] (r'[τ]+r[τ] θ'[τ] Cot[θ[τ]])/r[τ],
φ'[0] == vφ0i Csc[θ1]/r0,
φ[0] == φ0,
WhenEvent[Mod[θ[τ], π] == π/2.0 && r[τ]>si && r[τ]<sr &&
NumericQ[plunge0] == False,
(plunge0=τ) &&
(tt0=t[τ]) && (rt0=r[τ]) && (θt0=θ[τ]) && (φt0=φ[τ]) &&
(δt0=t'[τ]) && (δr0=r'[τ]) && (δθ0=θ'[τ]) && (δφ0=φ'[τ])],
WhenEvent[Mod[θ[τ], π] == π/2.0 && r[τ]>si && r[τ]<sr && Re[θ'[τ]]>0 &&
NumericQ[plunge1] == False,
(plunge1=τ) &&
(tt1=t[τ]) && (rt1=r[τ]) && (θt1=θ[τ]) && (φt1=φ[τ]) &&
(δt1=t'[τ]) && (δr1=r'[τ]) && (δθ1=θ'[τ]) && (δφ1=φ'[τ])],
WhenEvent[Mod[θ[τ], π] == π/2.0 && r[τ]>si && r[τ]<sr && Re[θ'[τ]]<0 &&
NumericQ[plunge2] == False,
(plunge2=τ) &&
(tt2=t[τ]) && (rt2=r[τ]) && (θt2=θ[τ]) && (φt2=φ[τ]) &&
(δt2=t'[τ]) && (δr2=r'[τ]) && (δθ2=θ'[τ]) && (δφ2=φ'[τ])],
WhenEvent[Mod[θ[τ], π] == π/2.0 && r[τ]>si && r[τ]<sr && Re[θ'[τ]]>0 &&
τ < plunge1-0.05 &&
NumericQ[plunge3]==False && NumericQ[plunge1] == True,
(plunge3=τ) &&
(tt3=t[τ]) && (rt3=r[τ]) && (θt3=θ[τ]) && (φt3=φ[τ]) &&
(δt3=t'[τ]) && (δr3=r'[τ]) && (δθ3=θ'[τ]) && (δφ3=φ'[τ])],
WhenEvent[Mod[θ[τ], π] == π/2.0 && r[τ]>si && r[τ]<sr && Re[θ'[τ]]<0 &&
τ < plunge2-0.05 &&
NumericQ[plunge4] == False && NumericQ[plunge2] == True,
(plunge4=τ) &&
(tt4=t[τ]) && (rt4=r[τ]) && (θt4=θ[τ]) && (φt4=φ[τ]) &&
(δt4=t'[τ]) && (δr4=r'[τ]) && (δθ4=θ'[τ]) && (δφ4=φ'[τ])],
WhenEvent[Abs[r[τ]] == N@R1 &&
NumericQ[plunge5] == False,
(plunge5=τ) && (tt5=t[τ]) && (rt5=r[τ]) && (θt5=θ[τ]) && (φt5=φ[τ]);
If[r0>R1, "StopIntegration"]],
WhenEvent[Abs[r[τ]] == R0||r[τ]>R0 &&
NumericQ[plunge6] == False,
(plunge6=τ) &&
(tt6=t[τ]) && (rt6=r[τ]) && (θt6=θ[τ]) && (φt6=φ[τ]);
"StopIntegration"]
};
(* Integrator *)
sol = TimeConstrained[NDSolve[DGL, {t, r, θ, φ}, {τ, 0, tmax},
WorkingPrecision-> wp,
Method-> mta,
MaxSteps-> Infinity,
StepMonitor :> (laststep=plunge7; plunge7=τ;
stepsize=plunge7-laststep;), Method->{"EventLocator",
"Event" :> (If[stepsize<1*^-4, 0, 1])}
], 10];
ft0s=If[NumericQ[plunge0], If[rt0>sr, {π, sr},
If[rt0<si, {π, sr}, {φt0+(tt0+r0) ωφ, rt0}]], {π, sr}];
ft1s=If[NumericQ[plunge1], If[rt1>sr, {π, sr},
If[rt1<si, {π, sr}, {φt1+(tt1+r0) ωφ, rt1}]], {π, sr}];
ft2s=If[NumericQ[plunge2], If[rt2>sr, {π, sr},
If[rt2<si, {π, sr}, {φt2+(tt2+r0) ωφ, rt2}]], {π, sr}];
ft3s=If[NumericQ[plunge3], If[rt3>sr, {π, sr},
If[rt3<si, {π, sr}, {φt3+(tt3+r0) ωφ, rt3}]], {π, sr}];
ft4s=If[NumericQ[plunge4], If[rt4>sr, {π, sr},
If[rt4<si, {π, sr}, {φt4+(tt4+r0) ωφ, rt4}]], {π, sr}];
ft0v=If[NumericQ[plunge0], If[rt0>sr, {0, 0},
If[rt0<si, {0, 0}, {-dφv[rt0, tt0+t0], 0}]], {0, 0}];
ft1v=If[NumericQ[plunge1], If[rt1>sr, {0, 0},
If[rt1<si, {0, 0}, {-dφv[rt1, tt1+t0], 0}]], {0, 0}];
ft2v=If[NumericQ[plunge2], If[rt2>sr, {0, 0},
If[rt2<si, {0, 0}, {-dφv[rt2, tt2+t0], 0}]], {0, 0}];
ft3v=If[NumericQ[plunge3], If[rt3>sr, {0, 0},
If[rt3<si, {0, 0}, {-dφv[rt3, tt3+t0], 0}]], {0, 0}];
ft4v=If[NumericQ[plunge4], If[rt4>sr, {0, 0},
If[rt4<si, {0, 0}, {-dφv[rt4, tt4+t0], 0}]], {0, 0}];
ft0f=If[NumericQ[plunge0], If[rt0>sr, {0, 0},
If[rt0<si, {0, 0}, {0, Min[2, shf[rt0, δt0, δr0, δθ0, δφ0]]}]], {0, 0}];
ft1f=If[NumericQ[plunge1], If[rt1>sr, {0, 0},
If[rt1<si, {0, 0}, {0, Min[2, shf[rt1, δt1, δr1, δθ1, δφ1]]}]], {0, 0}];
ft2f=If[NumericQ[plunge2], If[rt2>sr, {0, 0},
If[rt2<si, {0, 0}, {0, Min[2, shf[rt2, δt2, δr2, δθ2, δφ2]]}]], {0, 0}];
ft3f=If[NumericQ[plunge3], If[rt3>sr, {0, 0},
If[rt3<si, {0, 0}, {0, Min[2, shf[rt3, δt3, δr3, δθ3, δφ3]]}]], {0, 0}];
ft4f=If[NumericQ[plunge4], If[rt4>sr, {0, 0},
If[rt4<si, {0, 0}, {0, Min[2, shf[rt4, δt4, δr4, δθ4, δφ4]]}]], {0, 0}];
ft5h=If[NumericQ[plunge5], {φt5-π, θt5+π/2}, {0, -π/2}];
ft5b=If[NumericQ[plunge6], If[rt6<If[Element[R1, Reals], R1, 0], {0, -π/2},
If[rt6>4 R0, {0, -π/2}, {φt6-π, θt6+π/2}]], {0, -π/2}];
{
ft0s, ft1s, ft2s, ft3s, ft4s,
ft0s+ft0v, ft1s+ft1v, ft2s+ft2v, ft3s+ft3v, ft4s+ft4v,
ft0f, ft1f, ft2f, ft3f, ft4f,
ft5h, ft5b
}]];
mem : raytrace[{Ф_, ϑ_}] := mem = Quiet[Re[raytracer[{Ф, ϑ}]]];
ray01[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[01]];
ray02[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[02]];
ray03[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[03]];
ray04[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[04]];
ray05[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[05]];
ray06[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[06]];
ray07[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[07]];
ray08[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[08]];
ray09[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[09]];
ray10[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[10]];
ray11[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[11]];
ray12[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[12]];
ray13[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[13]];
ray14[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[14]];
ray15[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[15]];
ray16[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[16]];
ray17[{Ф_, ϑ_}] := raytrace[{Ф, ϑ}][[17]];
width1 = ImageDimensions[pic1][[1]]; height1 = ImageDimensions[pic1][[2]];
width2 = ImageDimensions[pic2][[1]]; height2 = ImageDimensions[pic2][[2]];
width3 = ImageDimensions[pic3][[1]]; height3 = ImageDimensions[pic3][[2]];
width4 = ImageDimensions[pic4][[1]]; height4 = ImageDimensions[pic4][[2]];
width5 = ImageDimensions[pic7][[1]]; height5 = ImageDimensions[pic7][[2]];
hzoom = If[breite>2 hoehe, 1/zoom, 1/zoom/2/hoehe*breite];
vzoom = If[breite>2 hoehe, 1/zoom*2 hoehe/breite, 1/zoom];
"Geschätzte Rechenzeit" -> 1.2 (AbsoluteTiming[Do[raytracer[{
RandomReal[{-π, π}]/zoom, RandomReal[{-π/2, π/2}]/zoom
}], {ü, 1, 50}]][[1]])/50*hoehe*breite/kernels/60 "Minuten"
FOV->{360.0 hzoom "degree", 180.0 vzoom "degree"}
img = ParallelTable[{
(* 1 Hintergrundpanorama *)
ImageTransformation[pct1, ray17, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-π, π-2π/width1},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+vvs/vzoom+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 2 Sphäre *)
ImageTransformation[pct2, ray16, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-3π/2, π/2-2π/width2},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+π/kernels/grain+vvs/vzoom} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 3 Scheibe Textur *)
ImageTransformation[pic3, ray01, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width3},
{si, sr+(sr-si)/height3}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 4 Scheibe Geometrie *)
ImageTransformation[pic4, ray01, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width4},
{si, sr}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 5 Hintergrundpanorama *)
ImageTransformation[pct3, ray17, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-π, π-2π/width5},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+vvs/vzoom+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 6 Sphäre *)
ImageTransformation[pct3, ray16, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{-π, π-2π/width5},
{-π/2, 3π/2}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+x+vvs/vzoom, -π/2+x+π/kernels/grain+vvs/vzoom} vzoom
},
Resampling->rsp, Padding->"Periodic"],
(* 7 Scheibe Textur komplett *)
ImageTransformation[pic7, ray01, {breite, Ceiling[hoehe/kernels/grain]},
DataRange->{
{0, 2π-2π/width5},
{si, sr+(sr-si)/height5}
},
PlotRange->{
{-π+hvs/hzoom, π+hvs/hzoom} hzoom,
{-π/2+vvs/vzoom+x, -π/2+vvs/vzoom+x+π/kernels/grain} vzoom
},
Resampling->rsp, Padding->"Periodic"]
}, {x, 0, π-π/kernels/grain, π/kernels/grain}];
image[num_] := ImageAssemble[Table[{img[[x, num]]}, {x, kernels grain, 1, -1}]];
fi[x_] := ColorNegate[x];
Grid[{Table[image[n], {n, 1, 7, 1}]}]
Quit[]
Output (in diesem Beispiel mit unbewegter Scheibe und ruhendem Beobachter, r=100, θ=70°, rk=3, ri=3, ra=7):
Aberration mit vr=vθ=0, vφ=0.95 (ArcSin[vφ]=71.8°) auf θ=70°; rk=3, ri=4, ra=7; 1. Zeile: r=40, r=30, 2. Zeile: r=20, r=10:
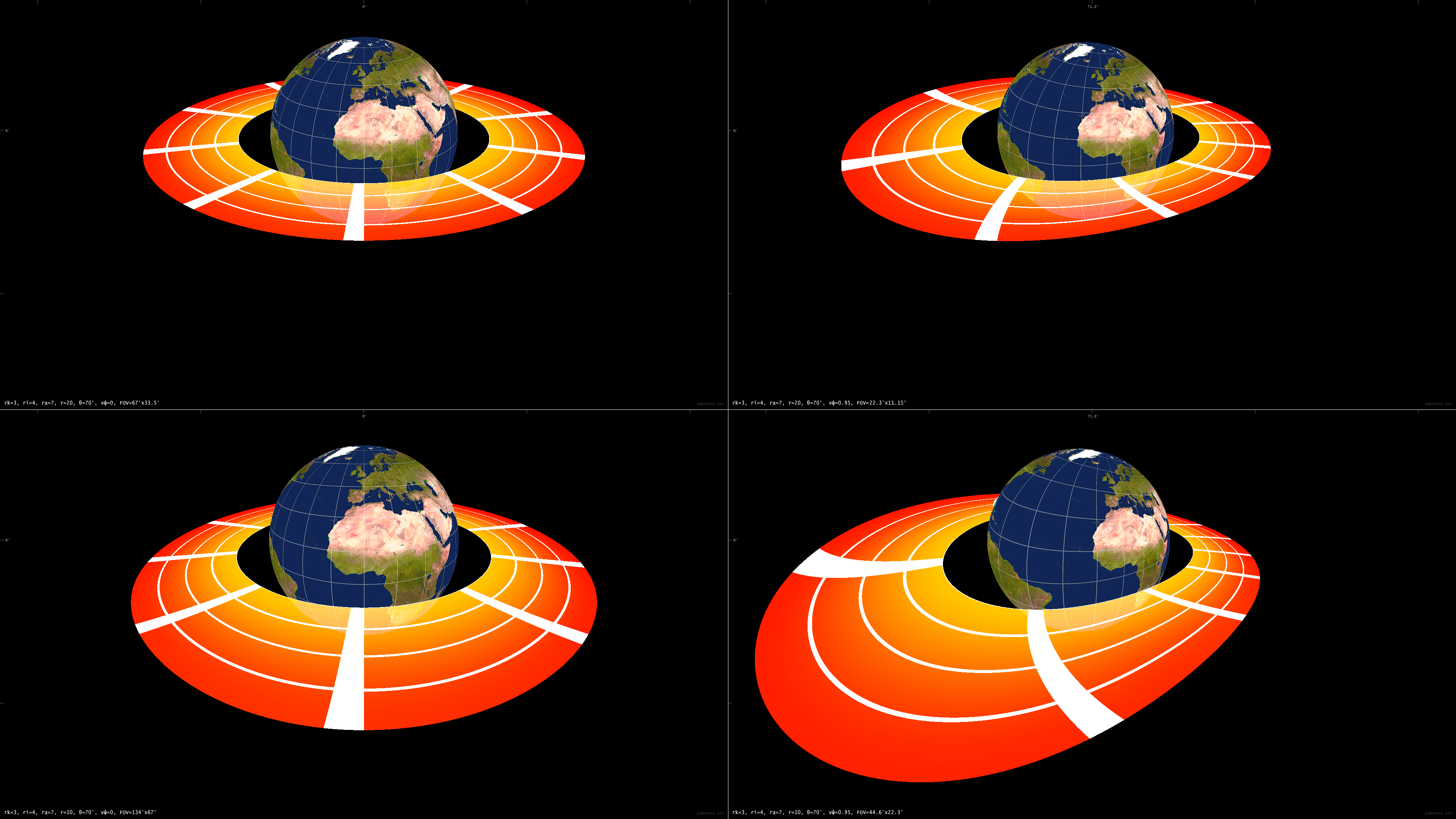
Vergleich der Perspektive eines Freifallers mit der eines ZAMO außerhalb und innerhalb eines SL mit Akkretionsscheibe: